basteln
Arduino Ascom Focuser Pro DIY

Die Fokussierung von Hand ist bei der Astrofotografie so eine Angelegenheit, die einem in den Wahnsinn treiben kann! Hab ich nun den Fokus erreicht, noch ein wenig weiter, weiter, … und wieder von vorne. Früher oder später war der Wunsch nach einer Fokussierung mit Motoren bei mir sehr präsent und ich begann zu recherchieren.
Durch mein Interesse an Minicomputern und deren Möglichkeiten entdeckte ich, nebst meinem bisherigen Steckenpferd Raspberry, den kleinen Bruder „Arduino“. Dieser Microcontroller eignet sich hervorragend für den Bau eines Motorfokus und ich begann mich Schritt für Schritt in die Materie einzulesen. Schnell merkte ich, dass die ganze Elektronik (Löten, Widerstände, Crimpen, etc.) und die Programmiersprache doch ziemliches Neuland war – trotz meiner vielseitigen und langjährigen Erfahrung in der IT. Zufälligerweise fand ich die Homepage eines holländischen Hobby-Astronomen, der ebenso wenig Ahnung hatte wie ich, auf der ich eine Anleitung resp. den „Initialtrigger“ für den Bau meines Motorfokus fand. Das Projekt „Arduino Ascom Focuser Pro DIY“ von Robert Brown diente als Basis und die Reise konnte nun endlich beginnen.
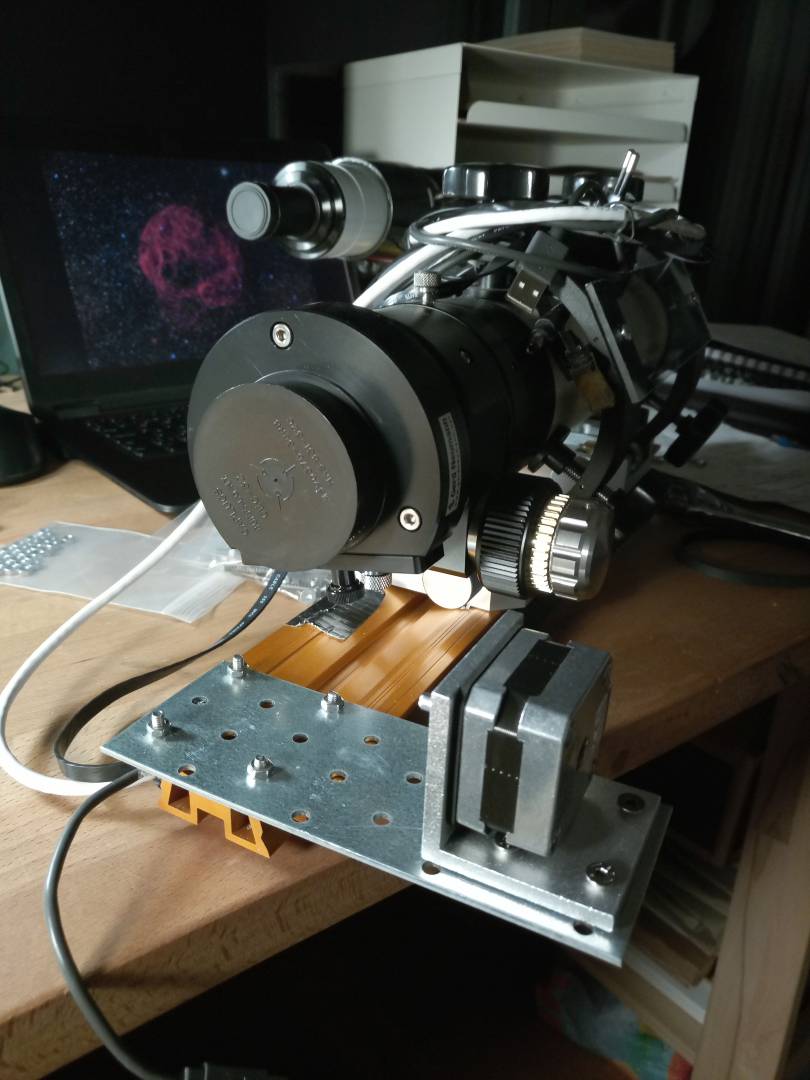
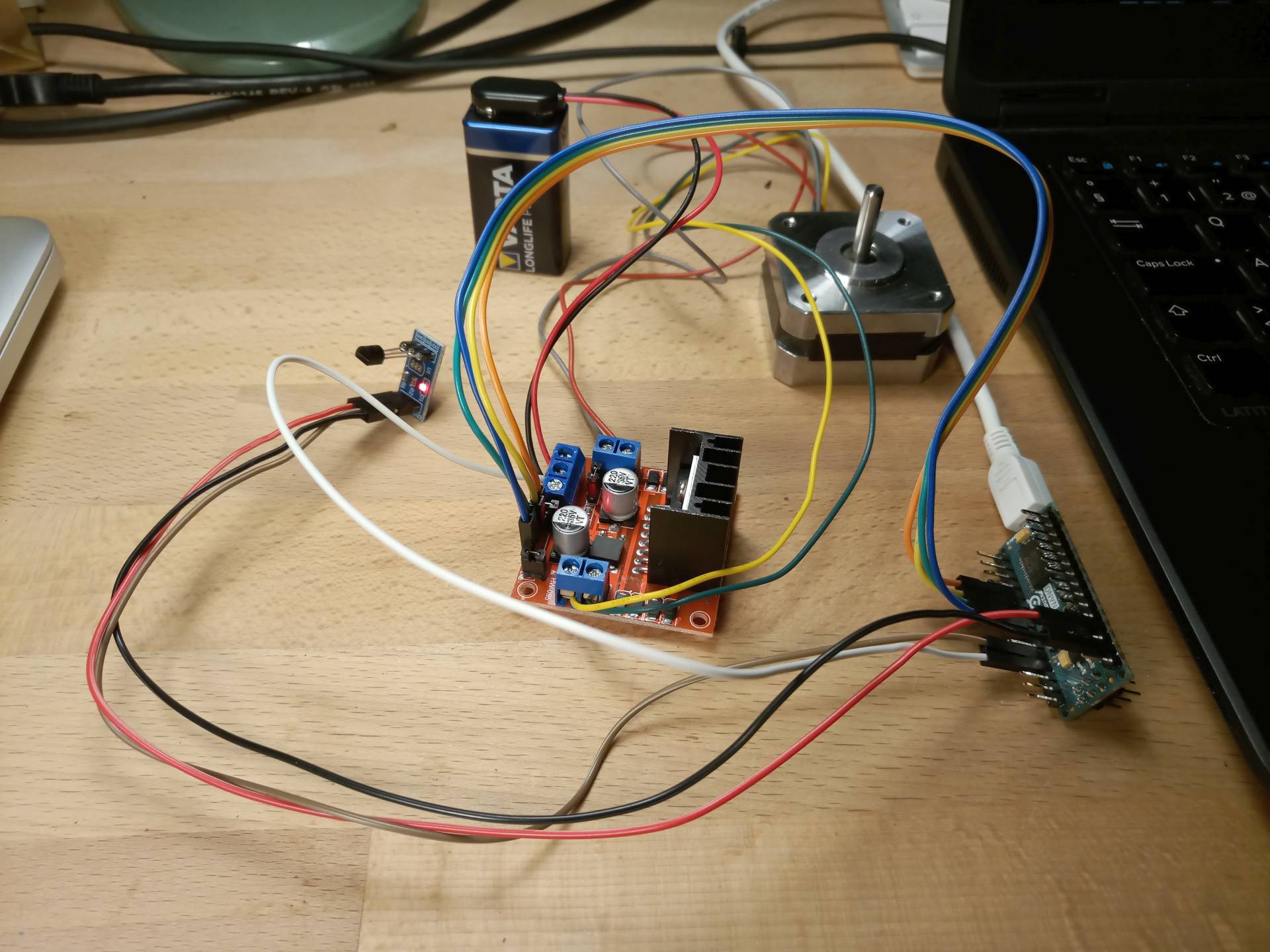
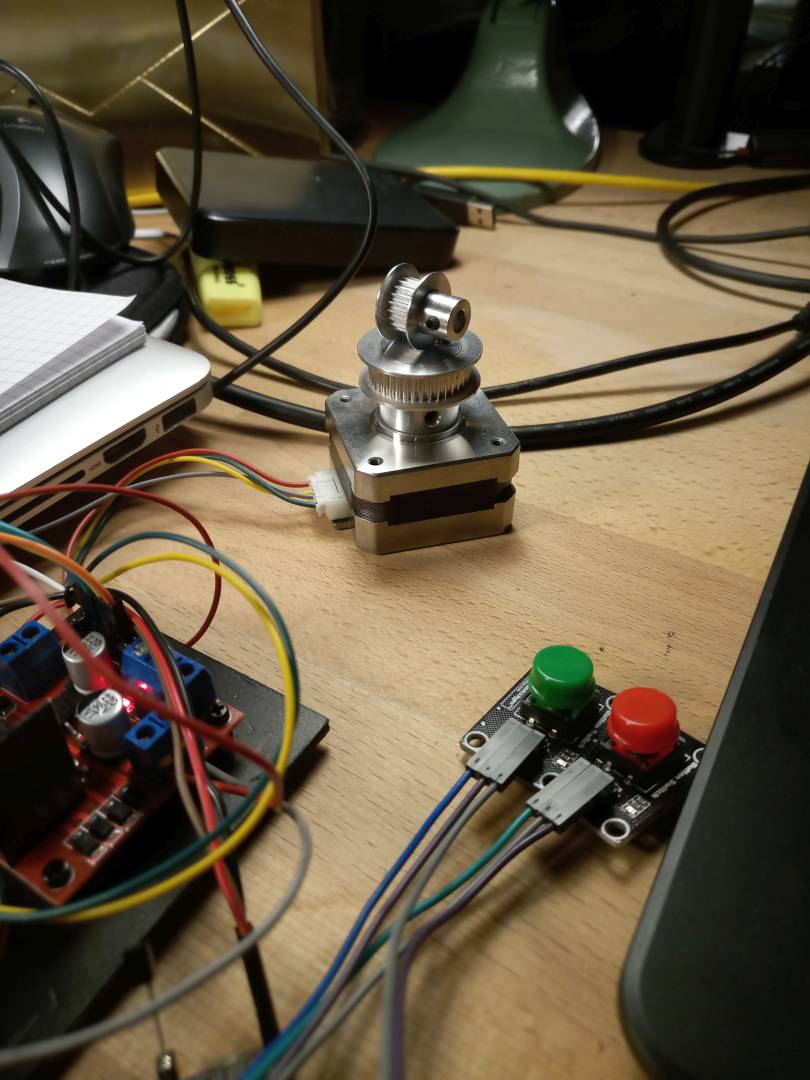
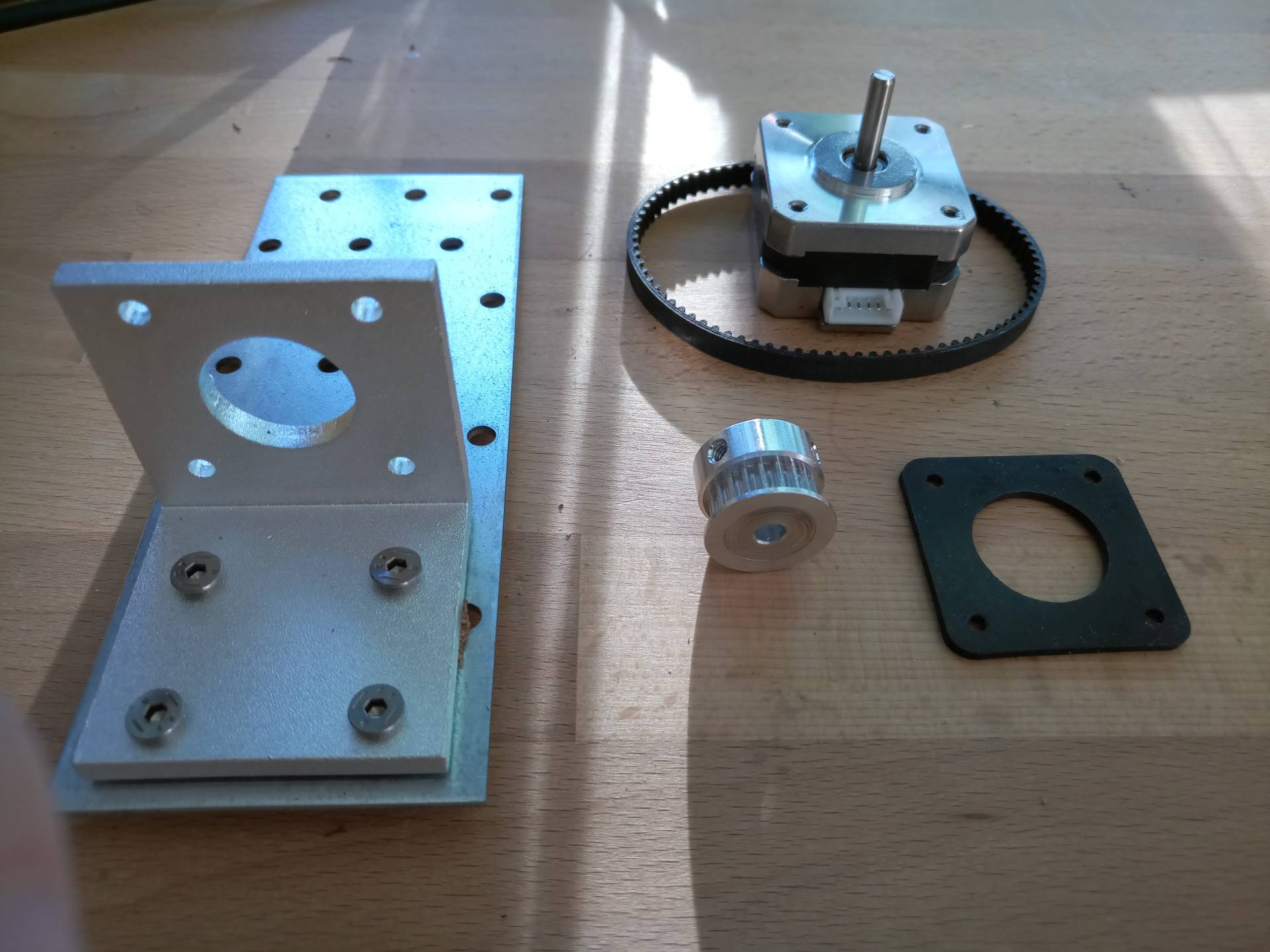
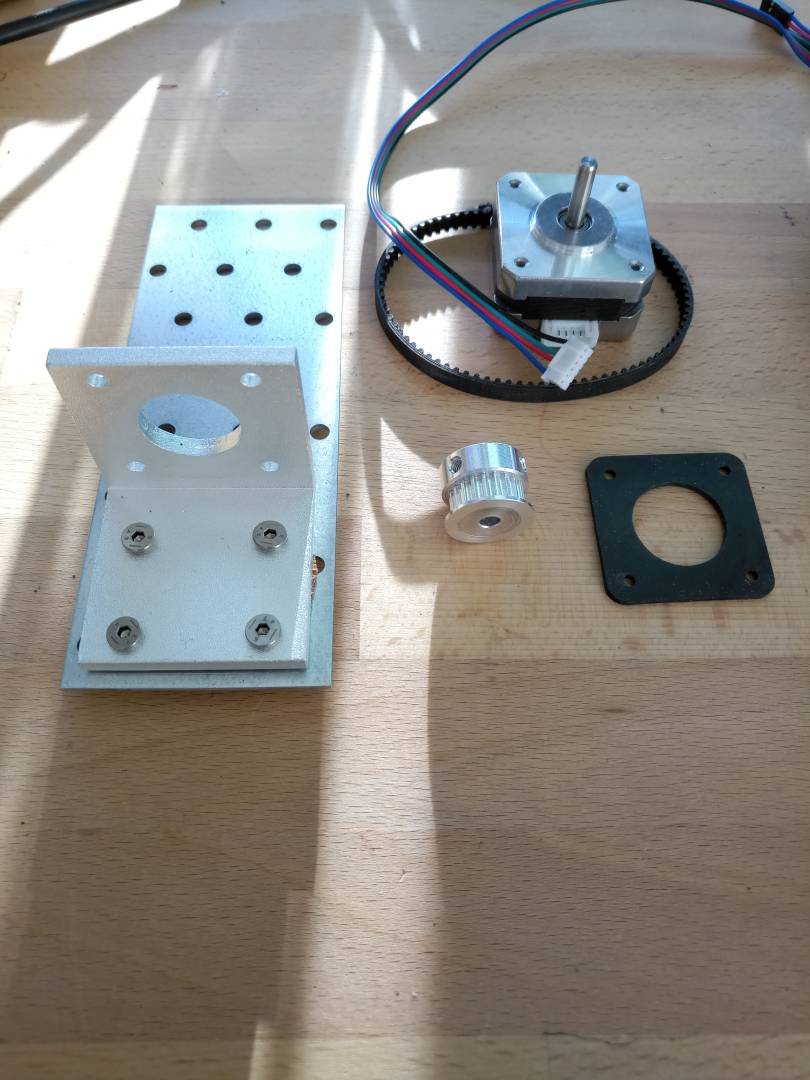
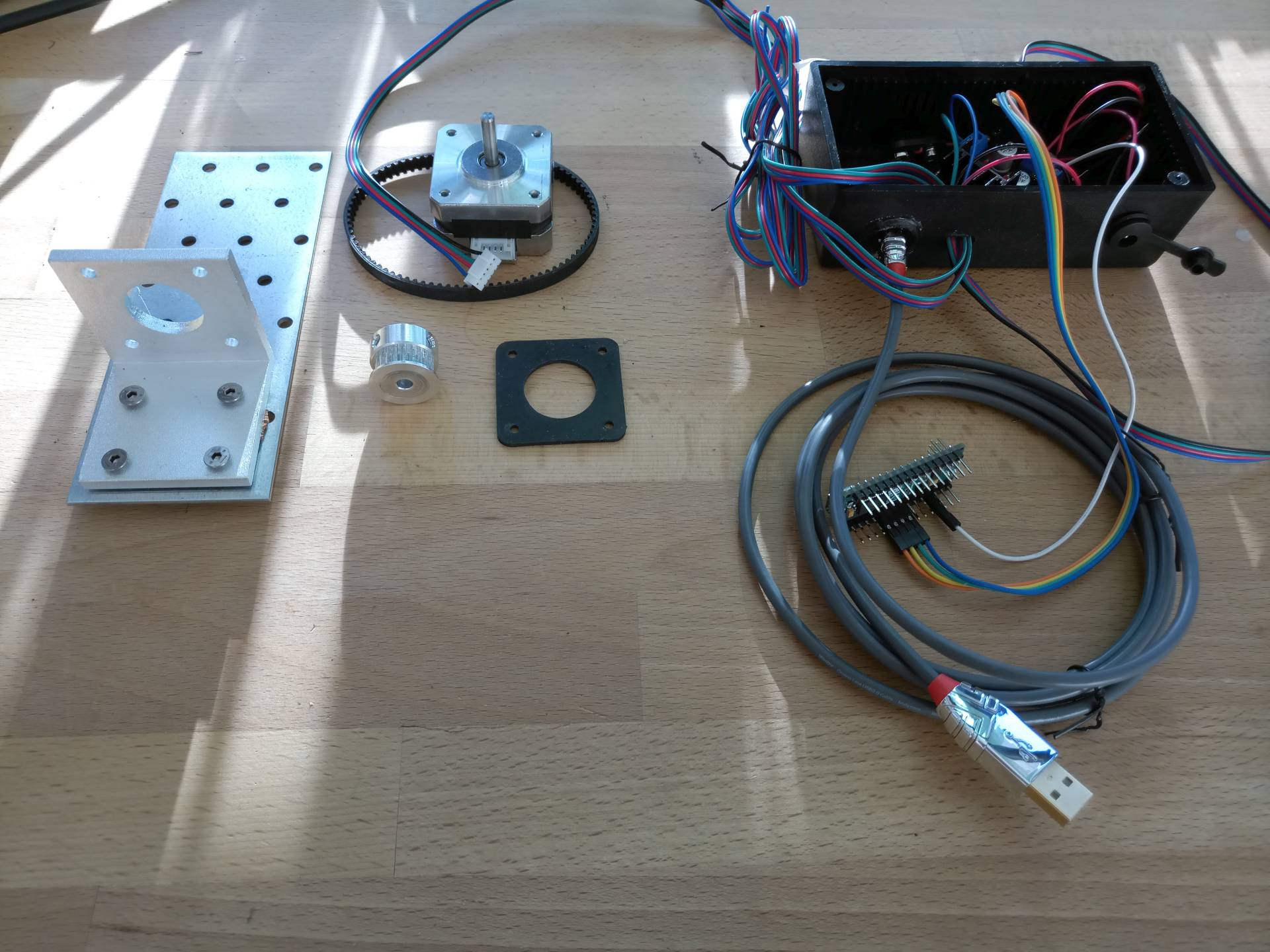
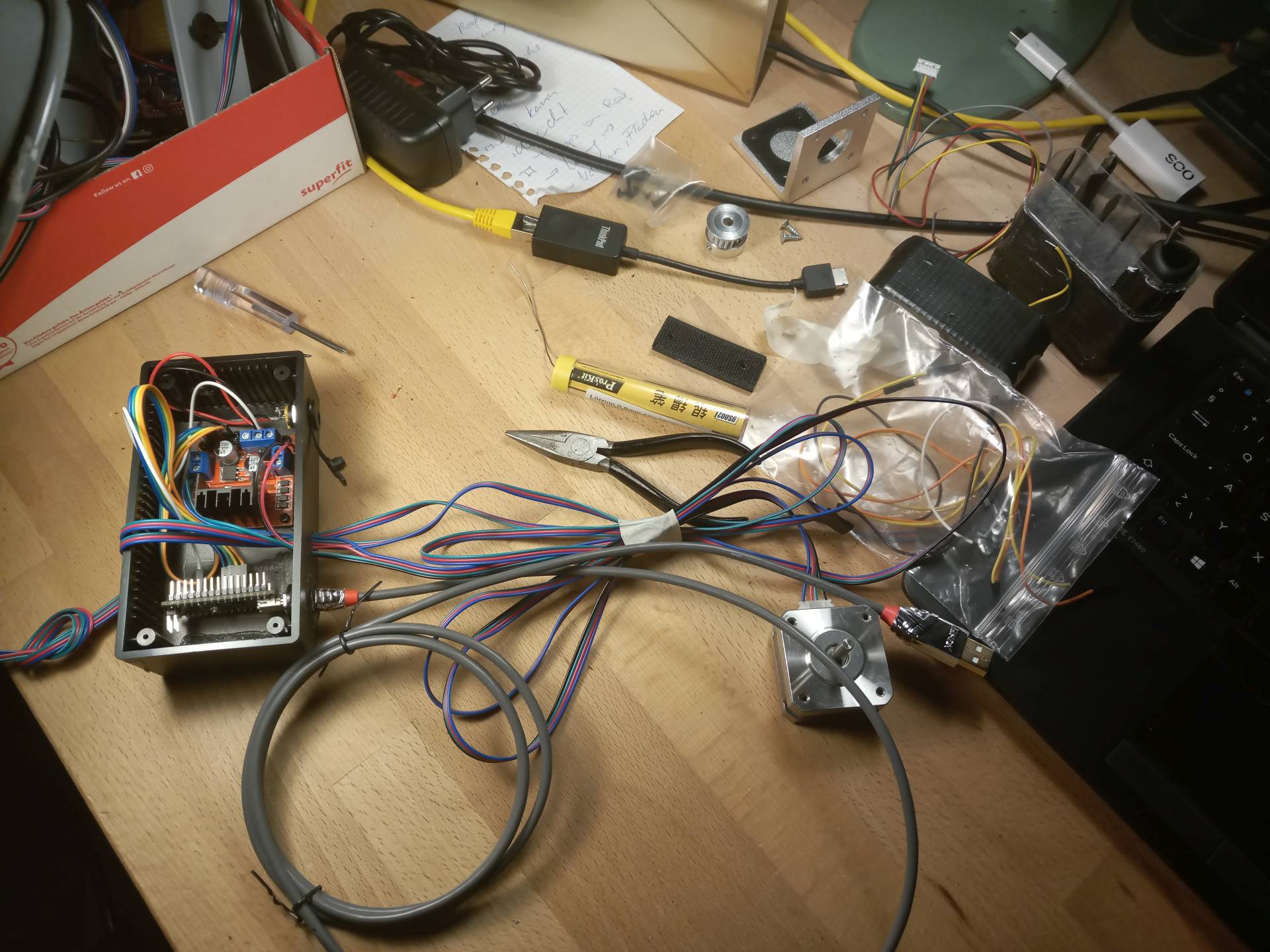
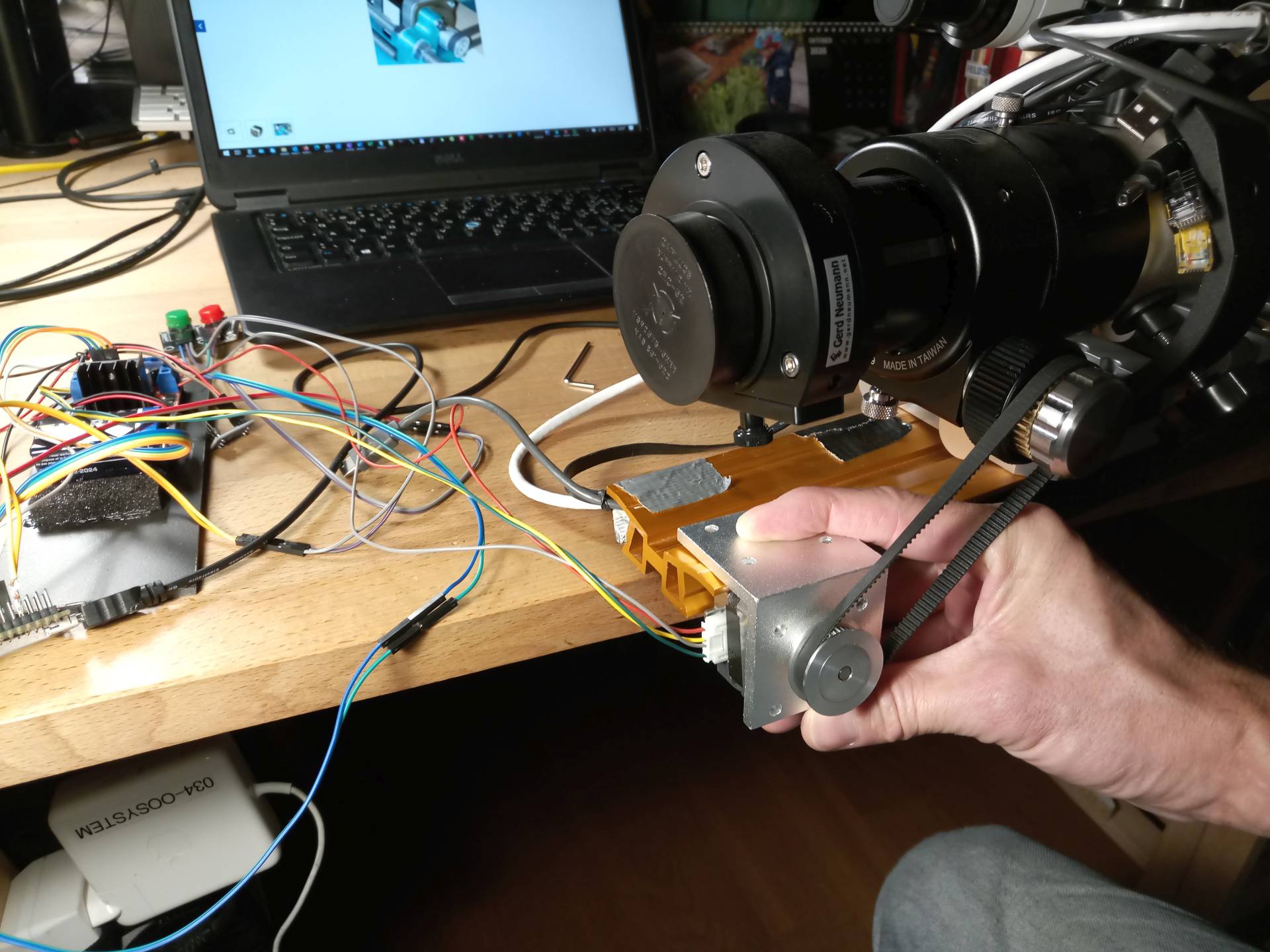
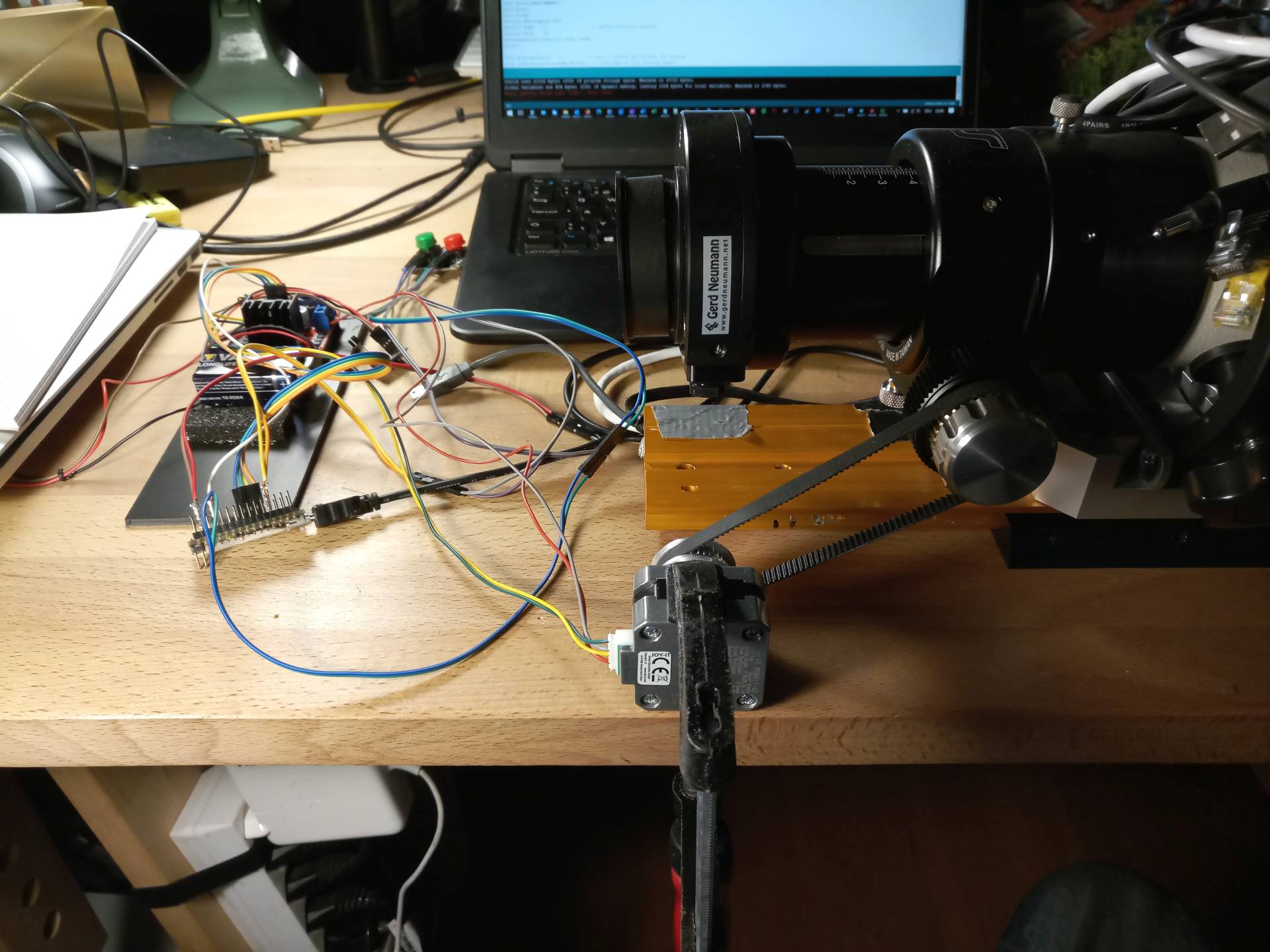
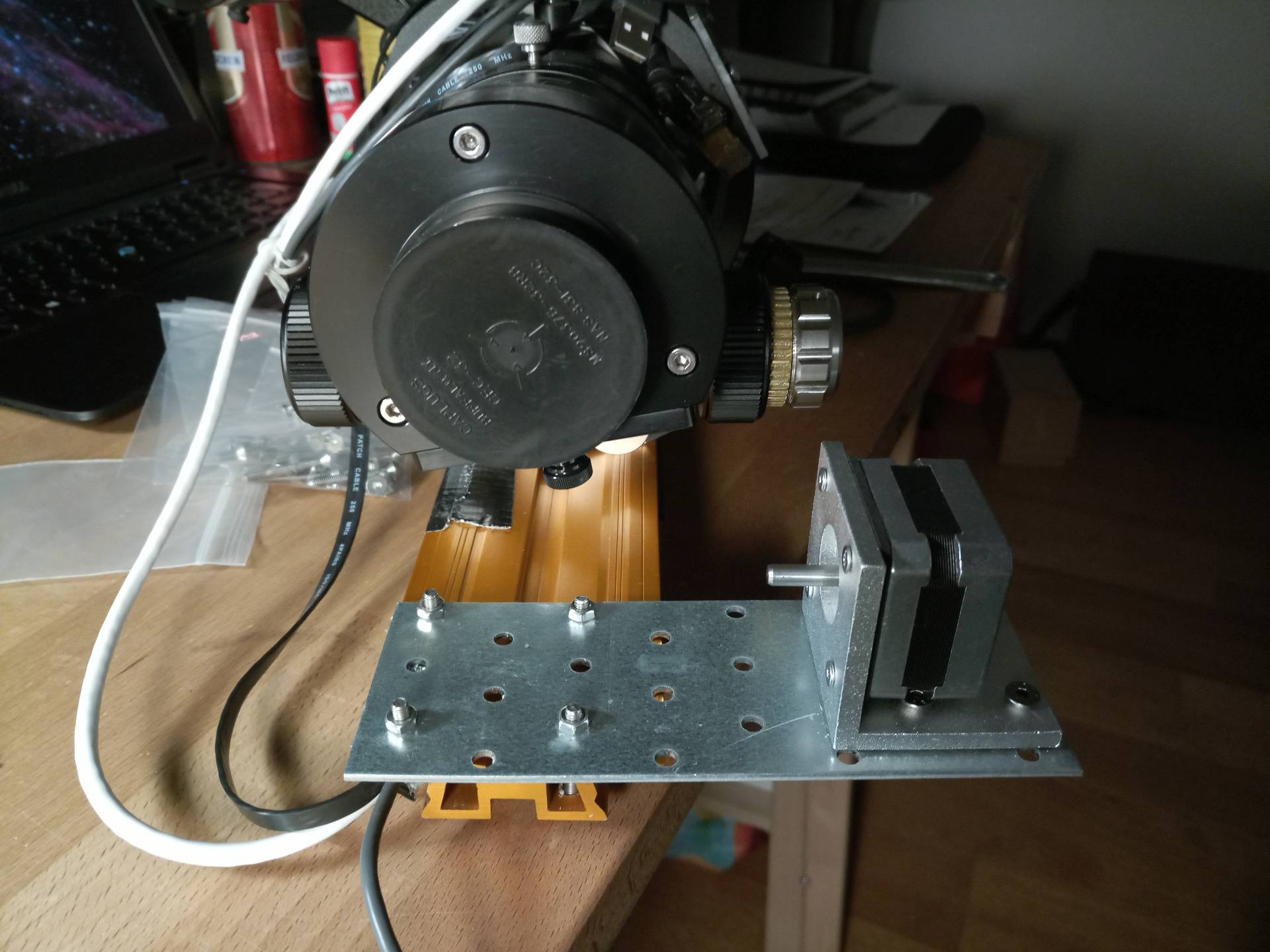
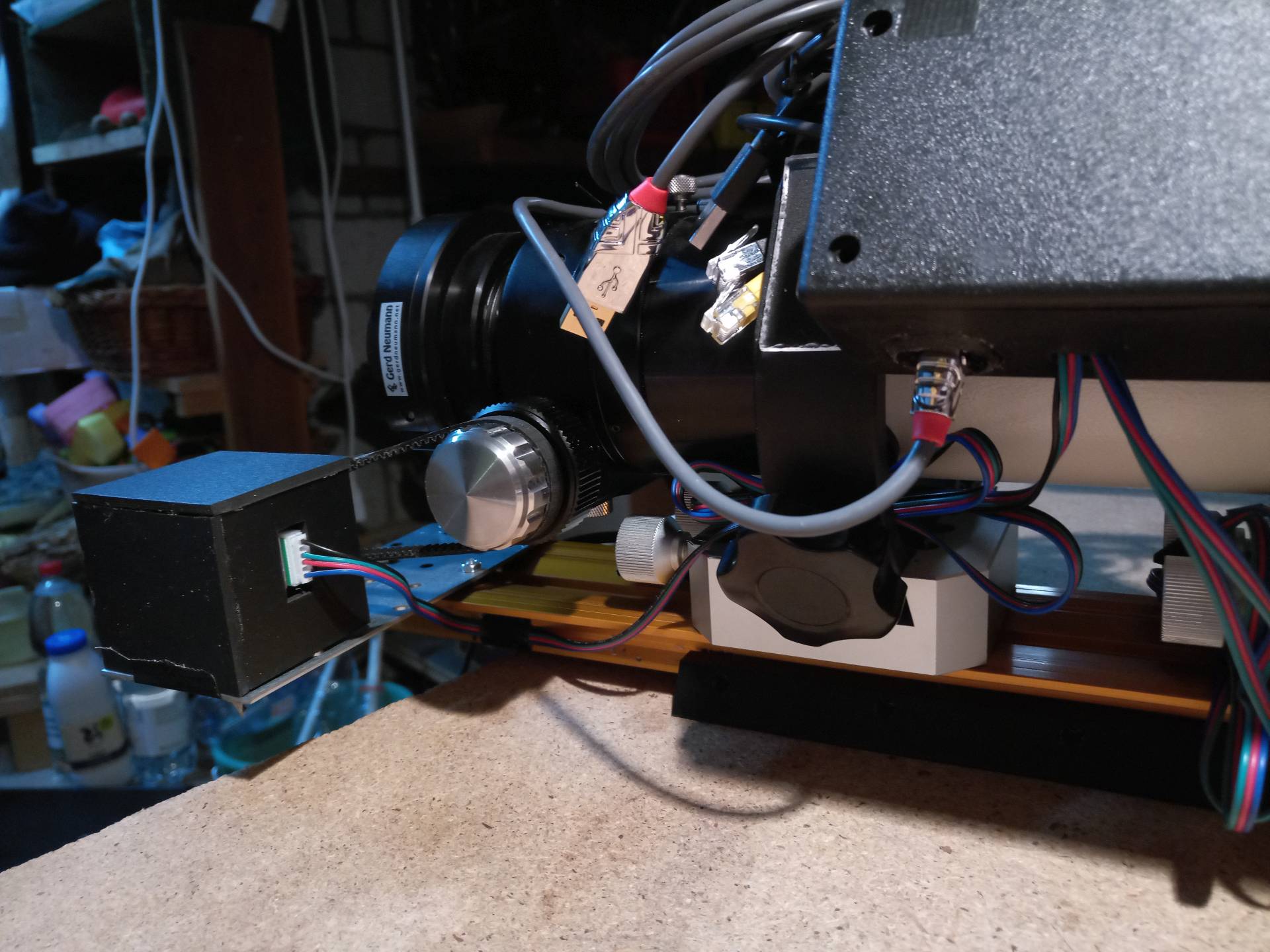
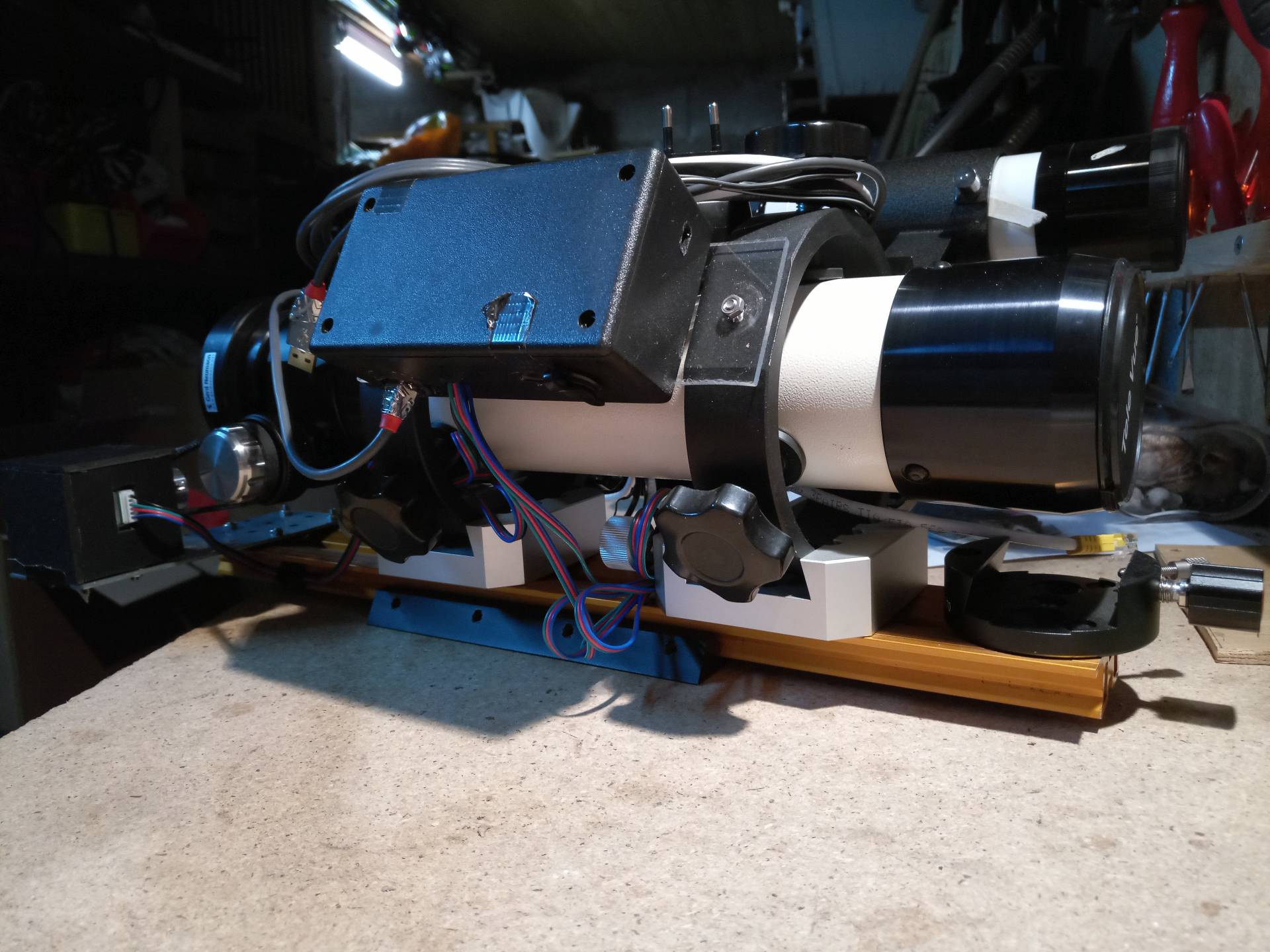
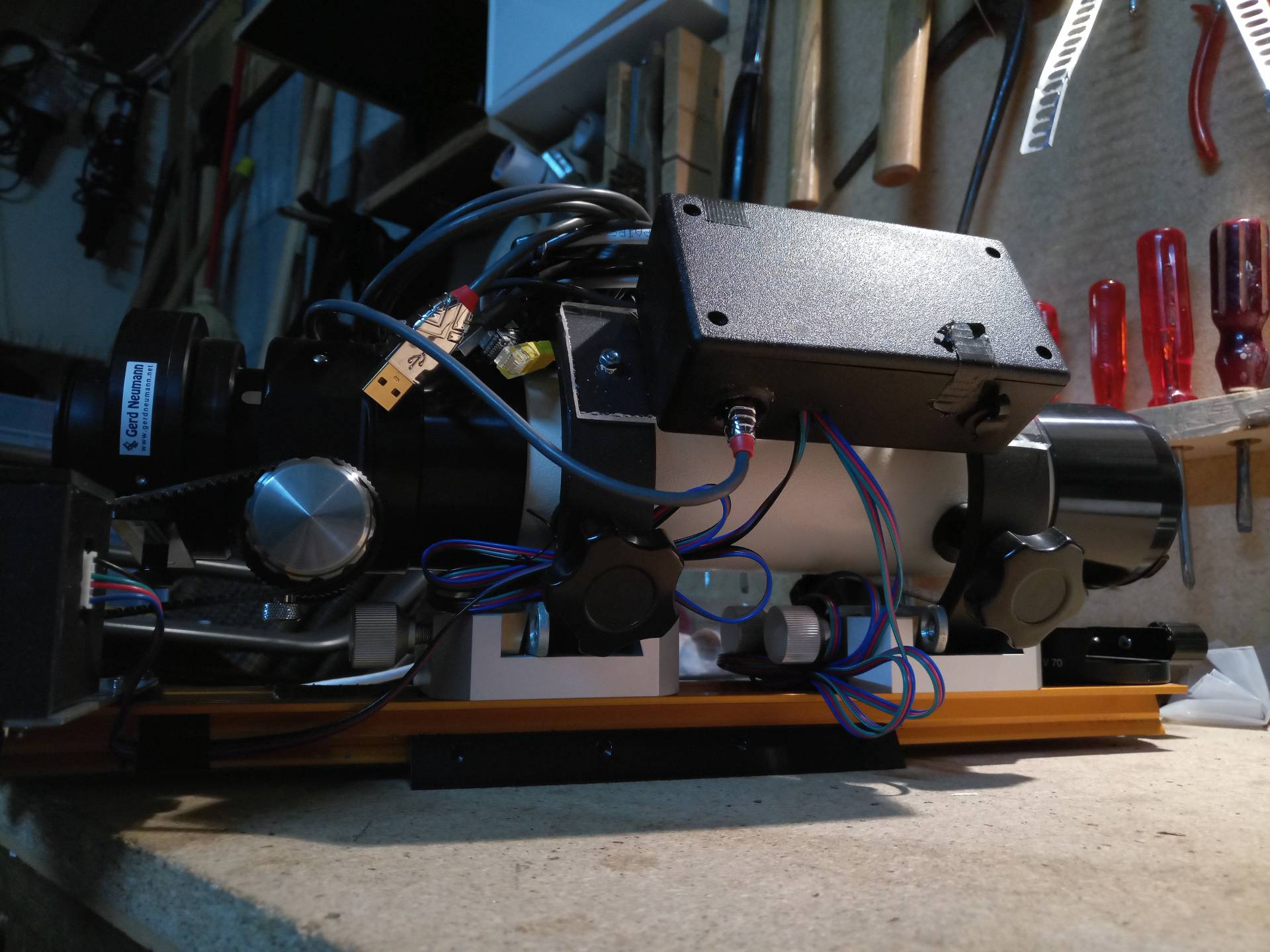
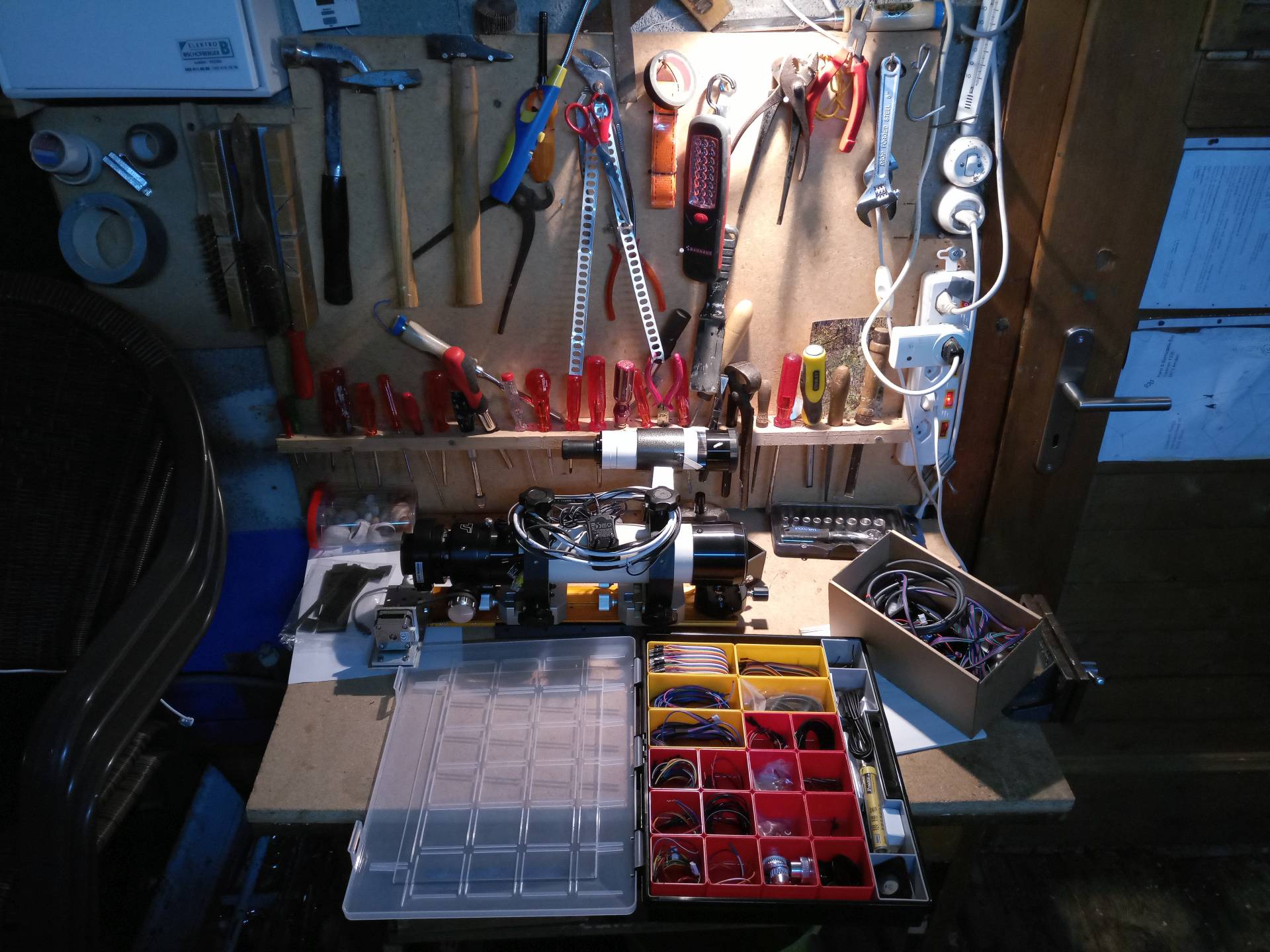
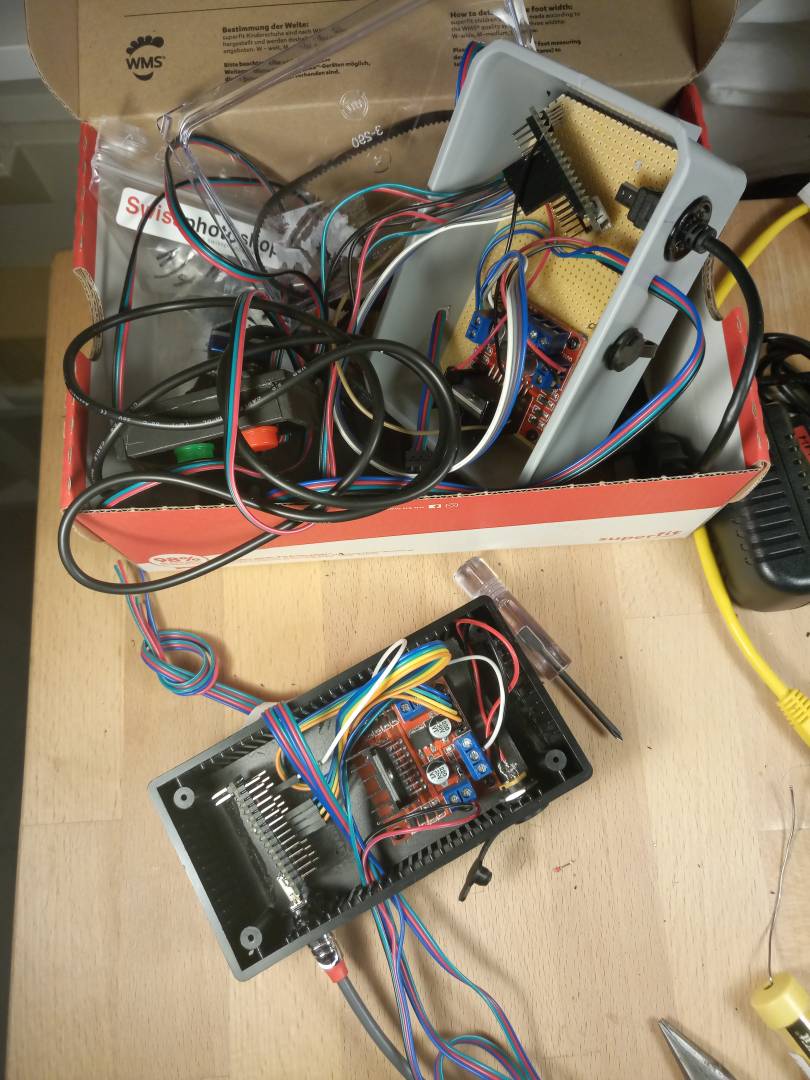
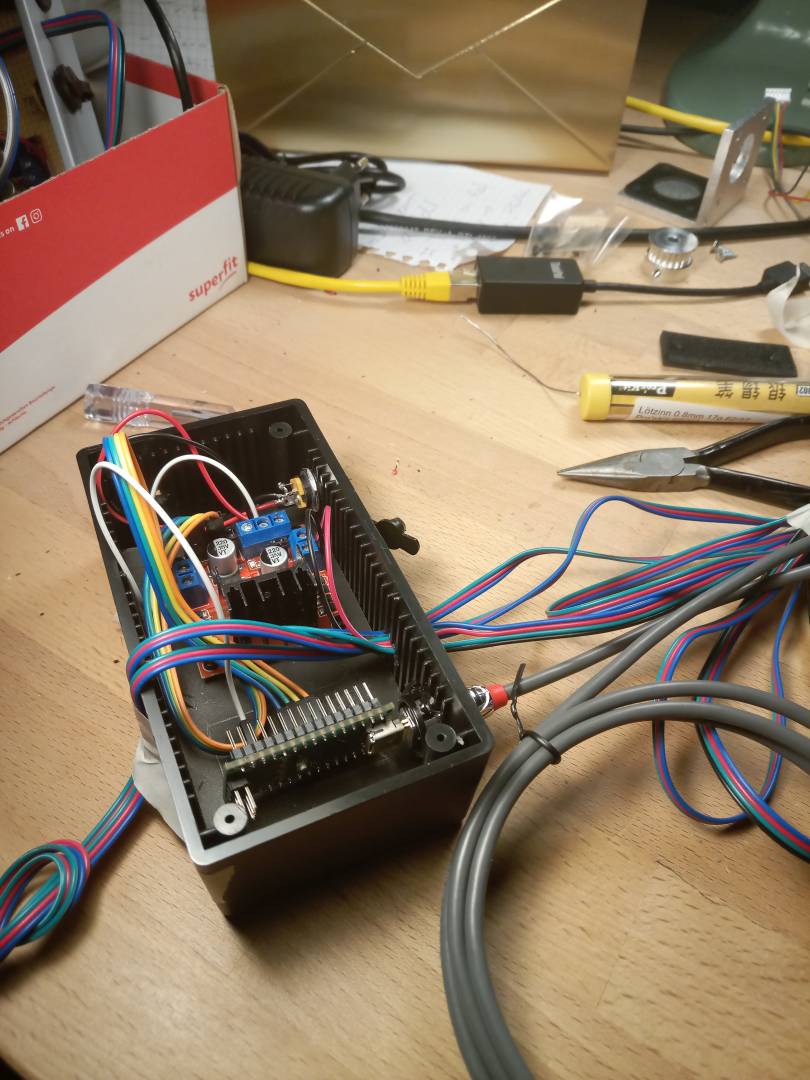
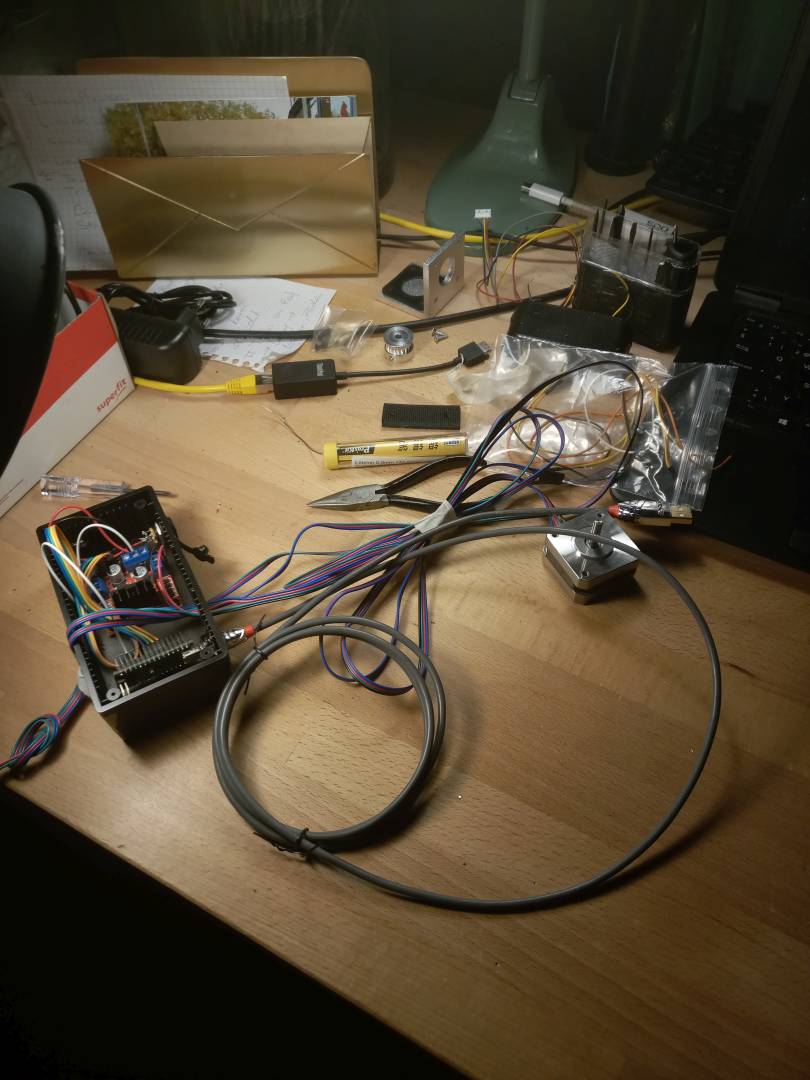
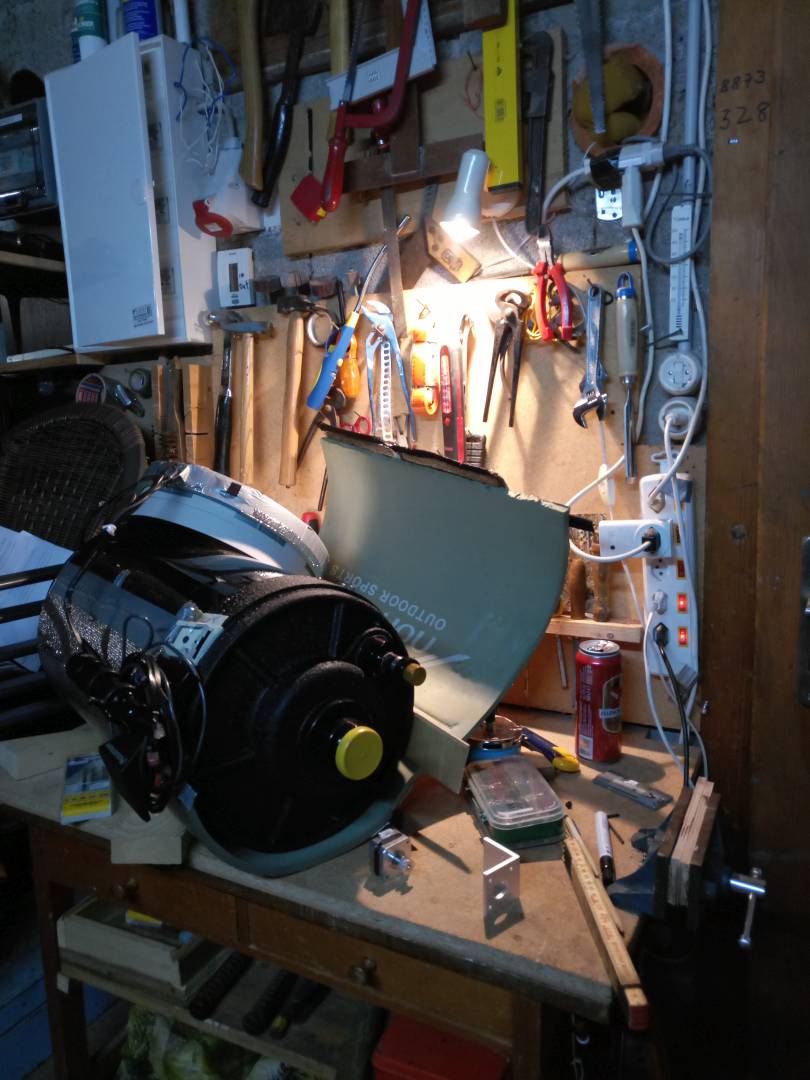
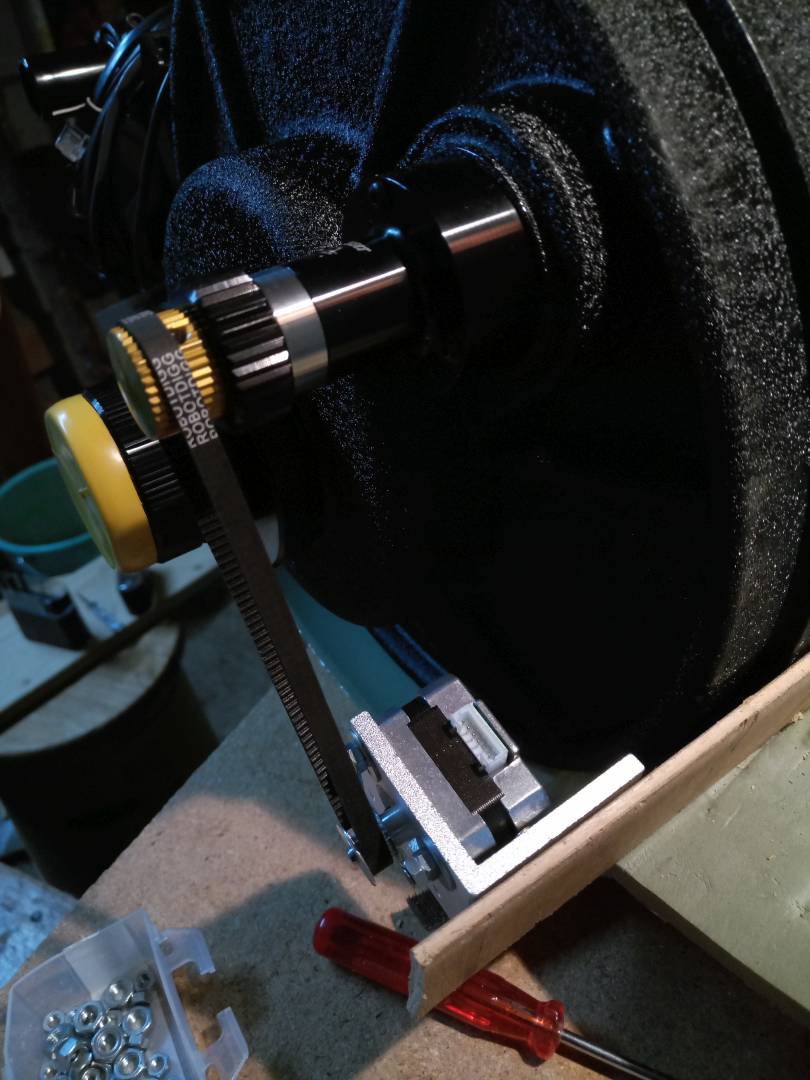
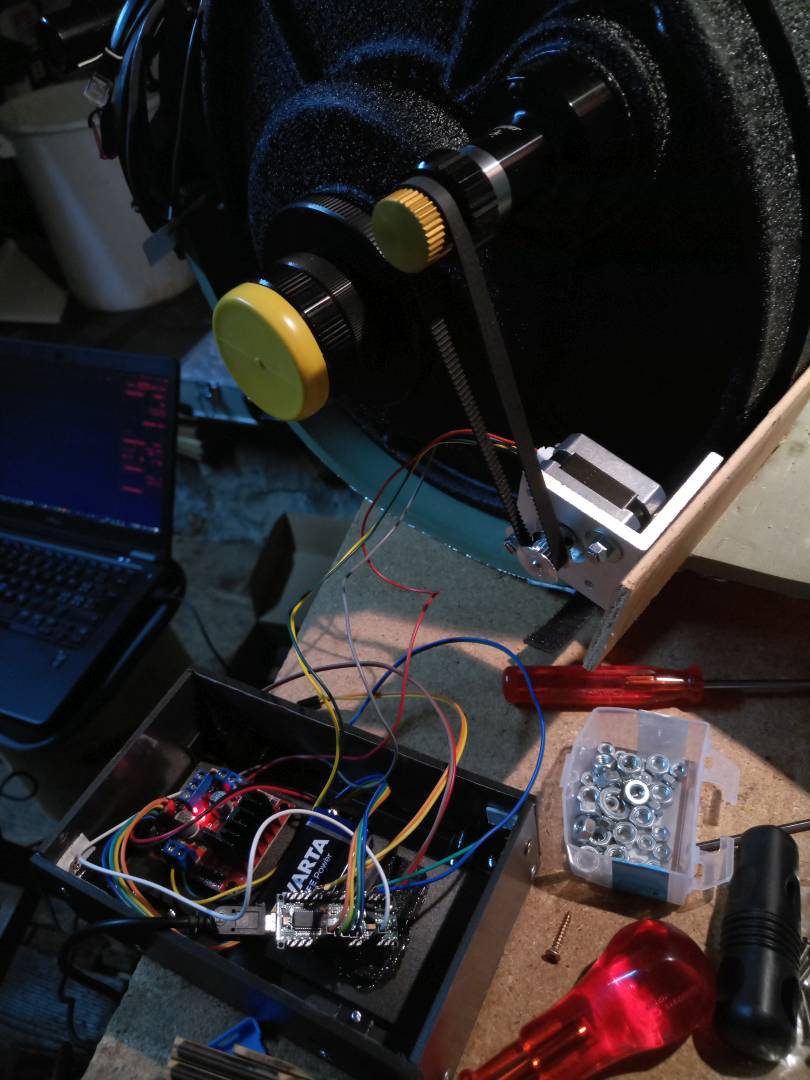
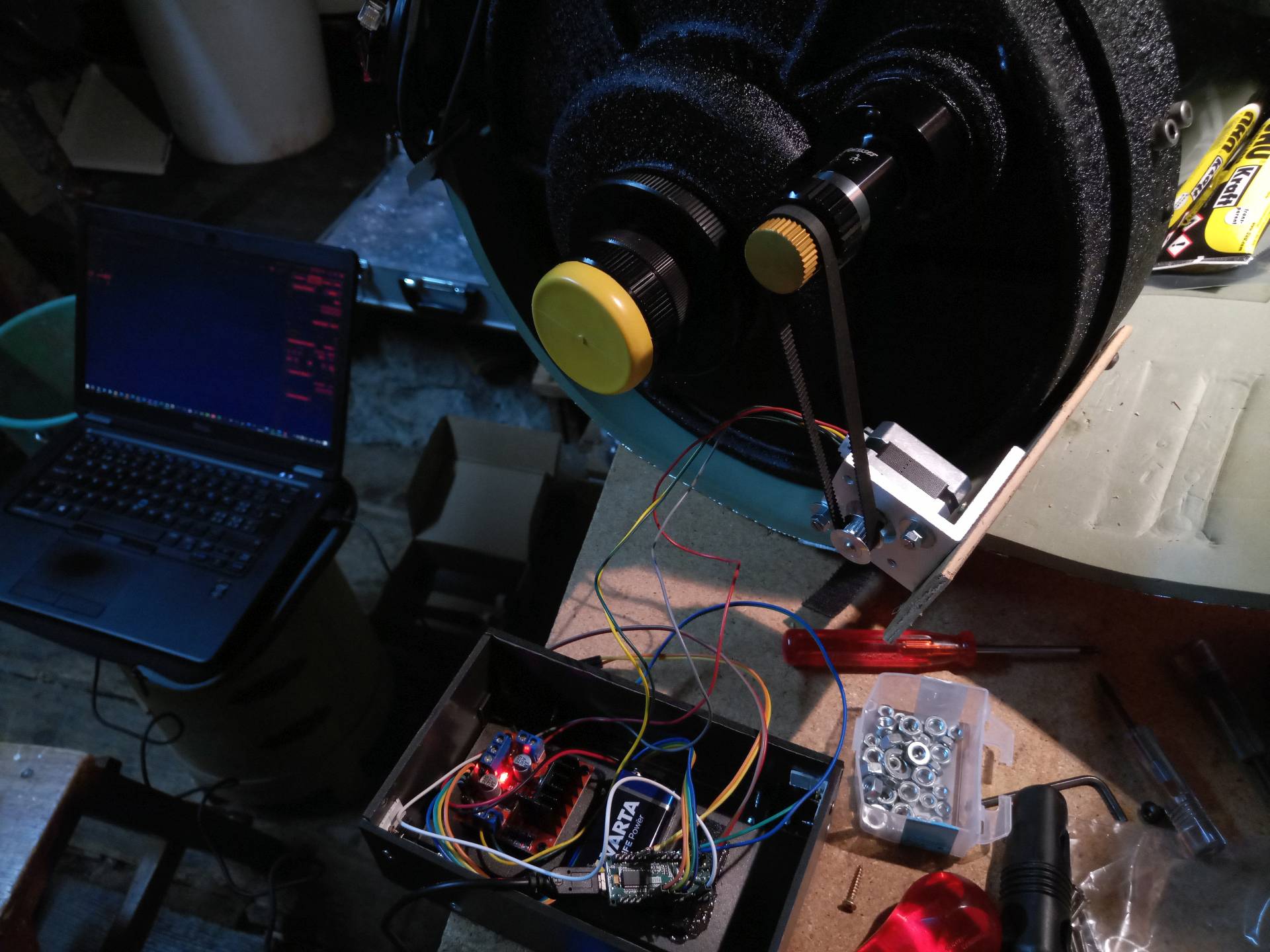
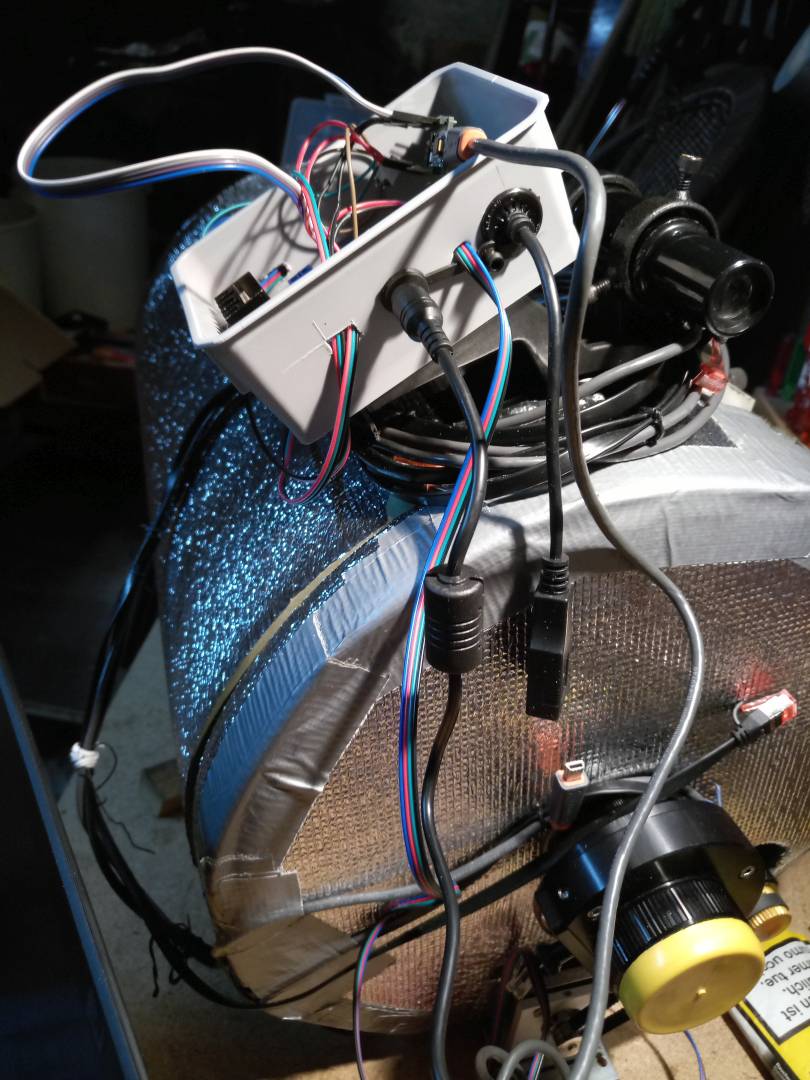
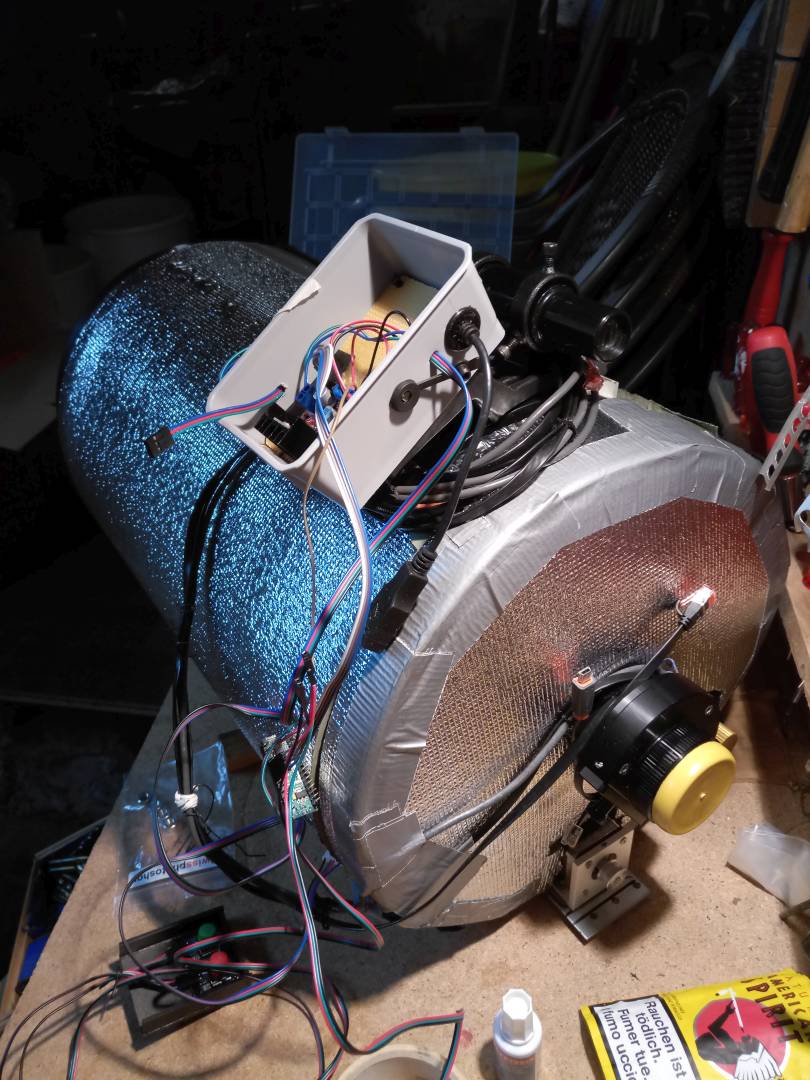
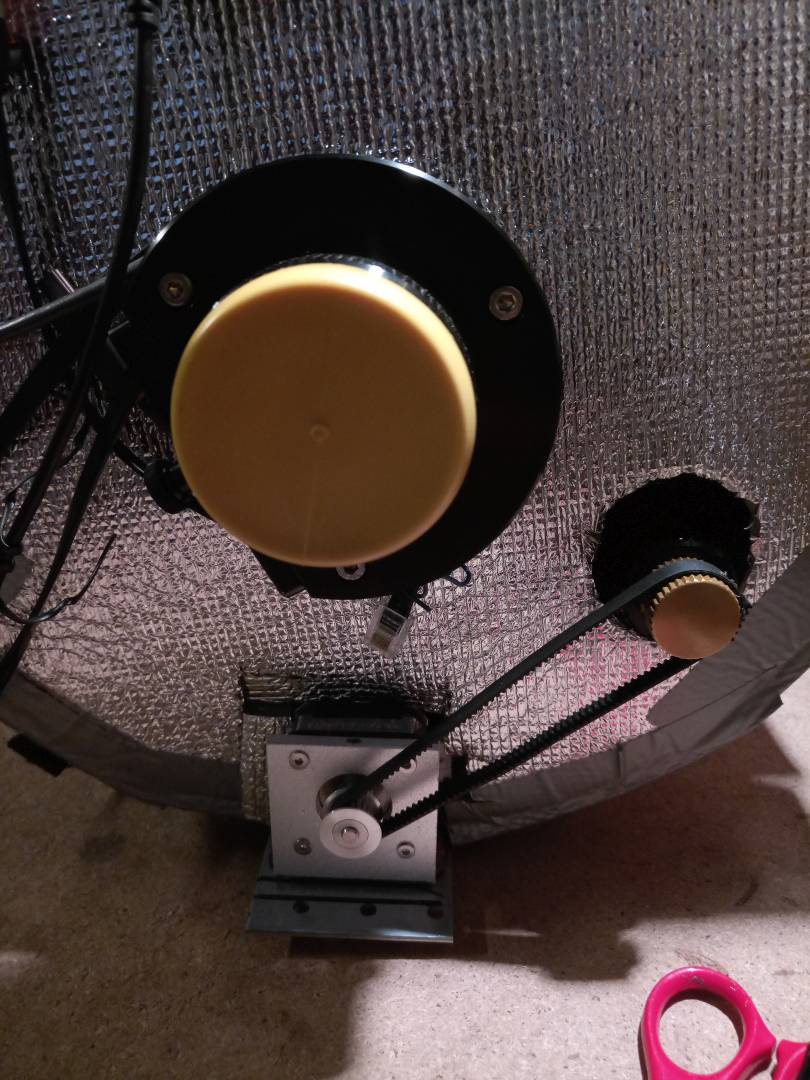
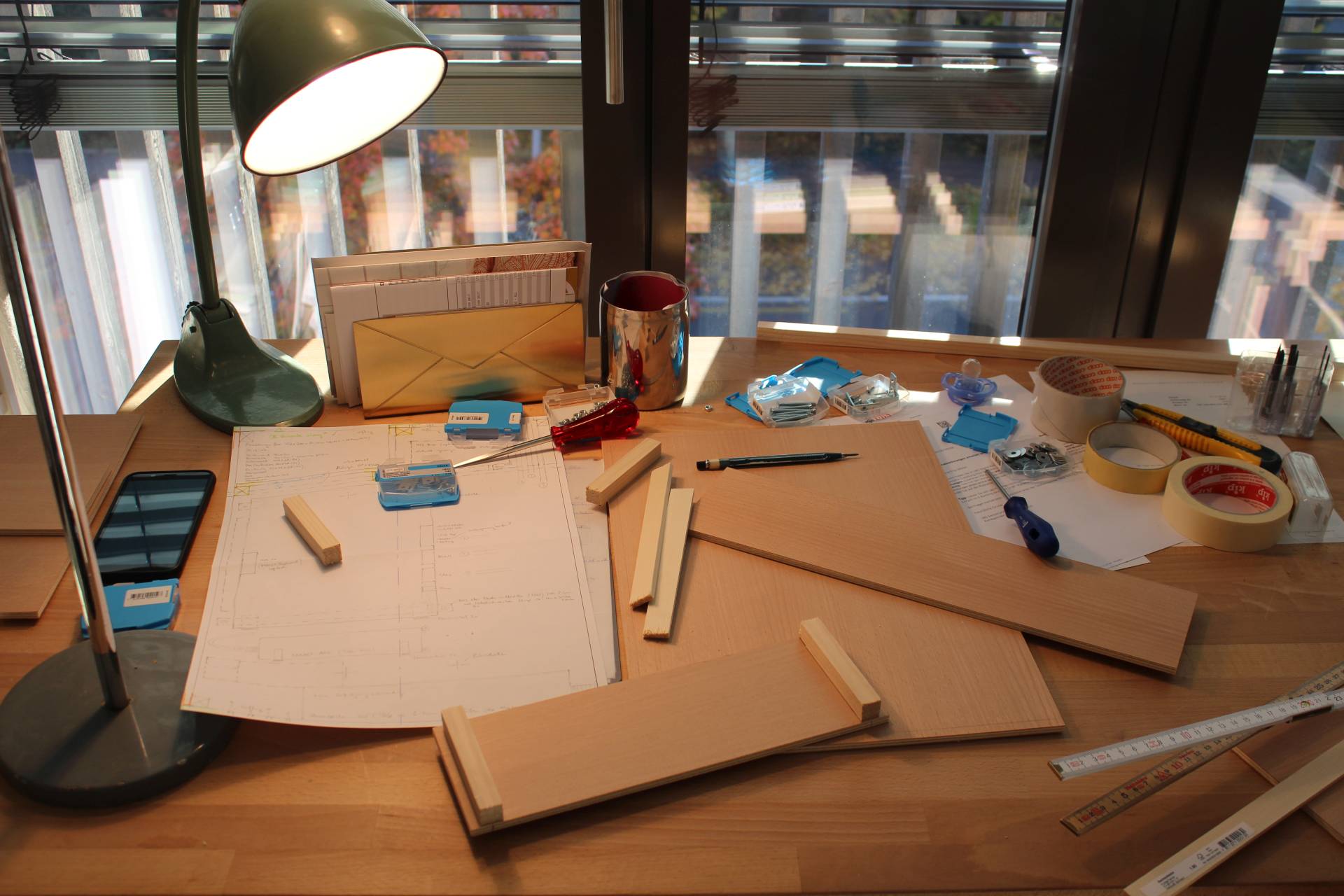
Die einzelnen Hauptkomponenten wie Arduino, Nema Motoren und Treiber Board lagen bald auf meinem Arbeitstisch und ich setze das Gelesene in die Praxis um. Danach alles provisorisch verkabelt, den Code geladen, Treiber installiert, APT gestartet und der Schrittmotor drehte sich tatsächlich – Freude herrscht! Doch nun gings ans Eingemacht mit der Montage am Teleskop und bereits bei der Länge des Zahnriemens und der Wahl des Zahnrades geriet mein Unterfangen „ins Stocken“: Wie viele Zähne hat das Ritzel, welche Länge hat der Riemen und welches Profil passt? Fragen über Fragen, die sich nur mit viel recherchieren und einigen Testkäufen langsam klärten. Nach etlichen Nachschichten war der erste Motorfokus an meinen TeleVue Ranger Refraktor mit einem TS UNC OAZ montiert.
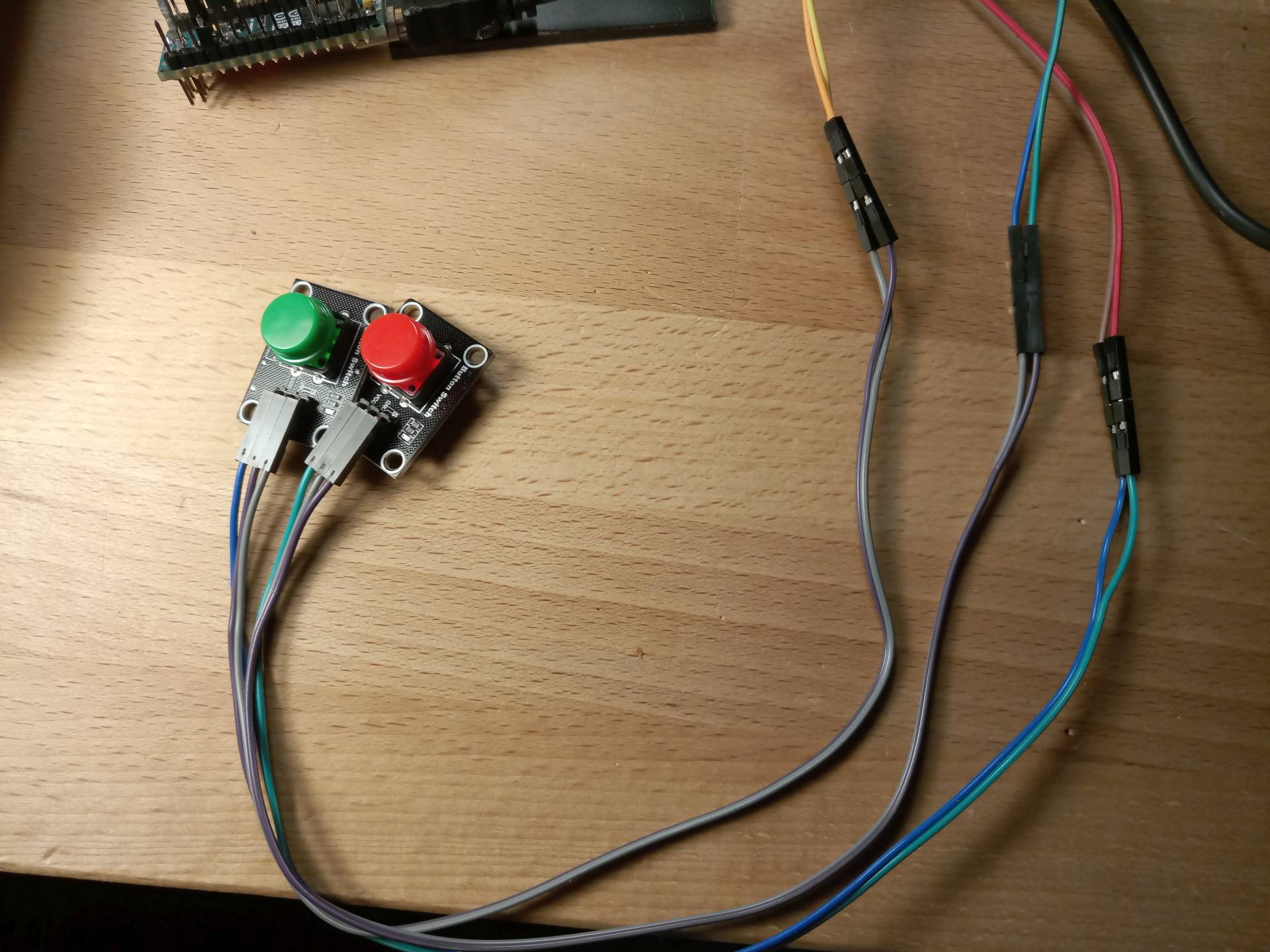
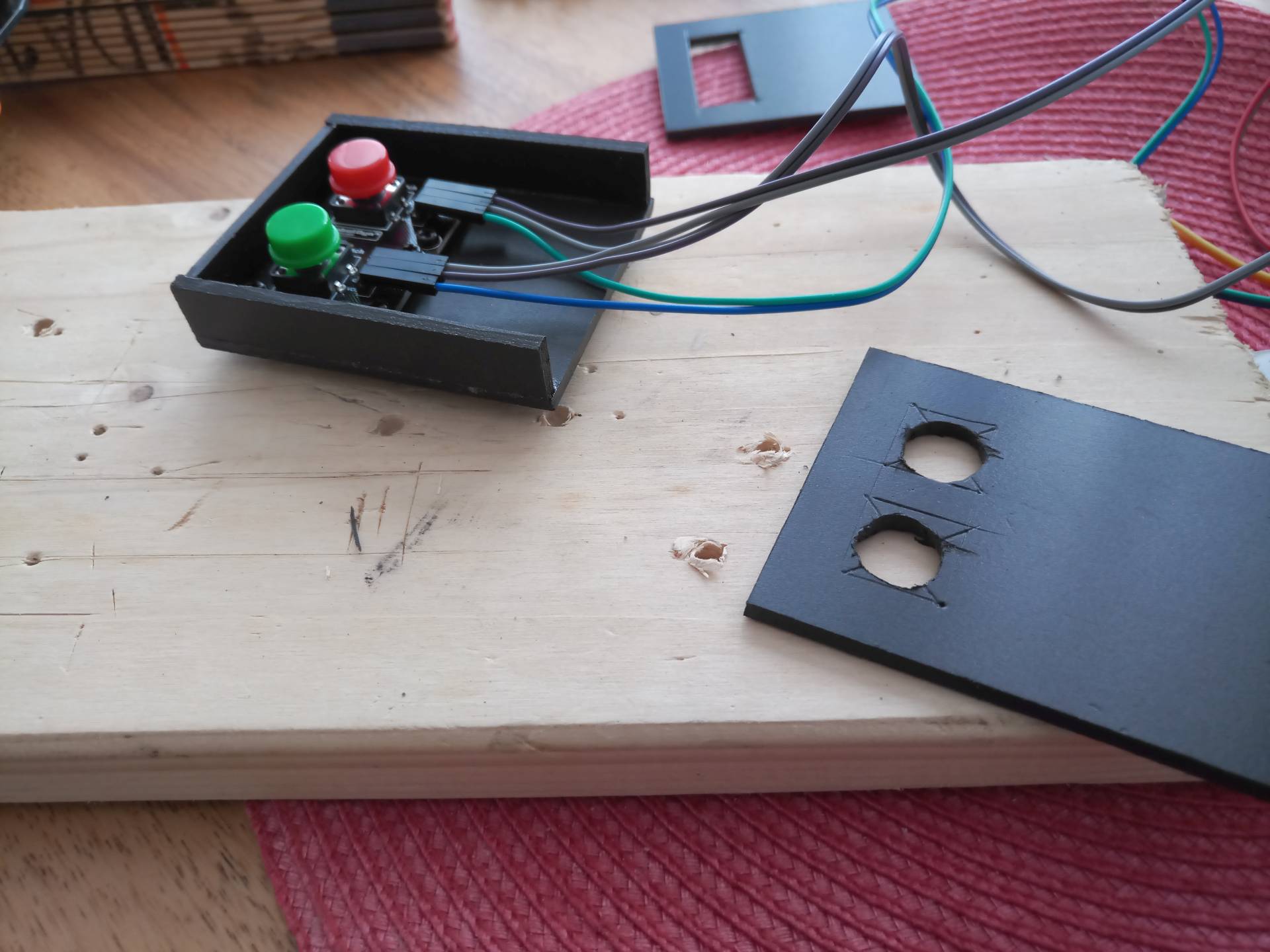
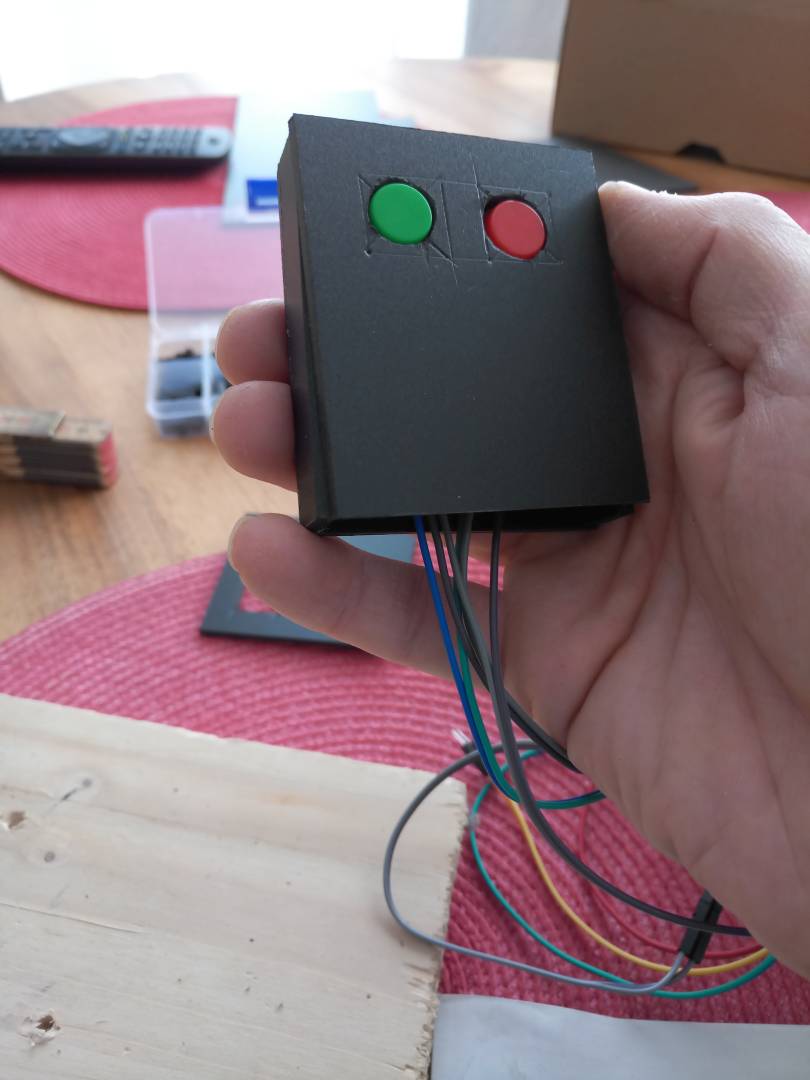
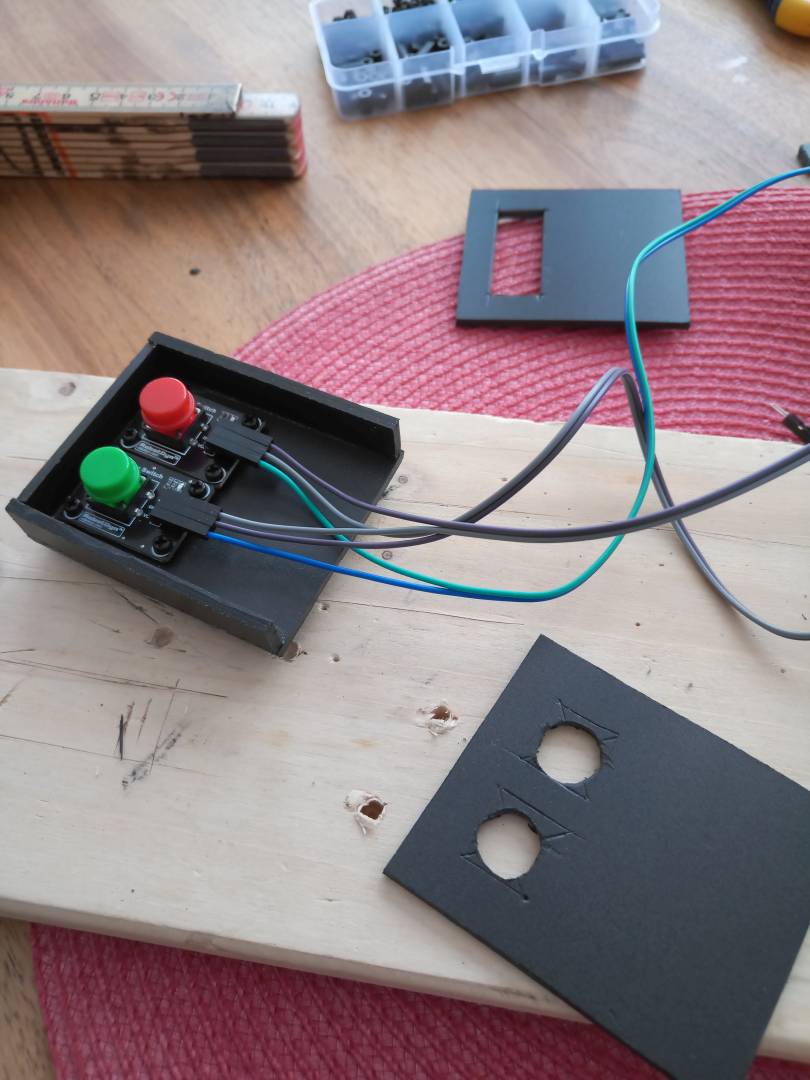
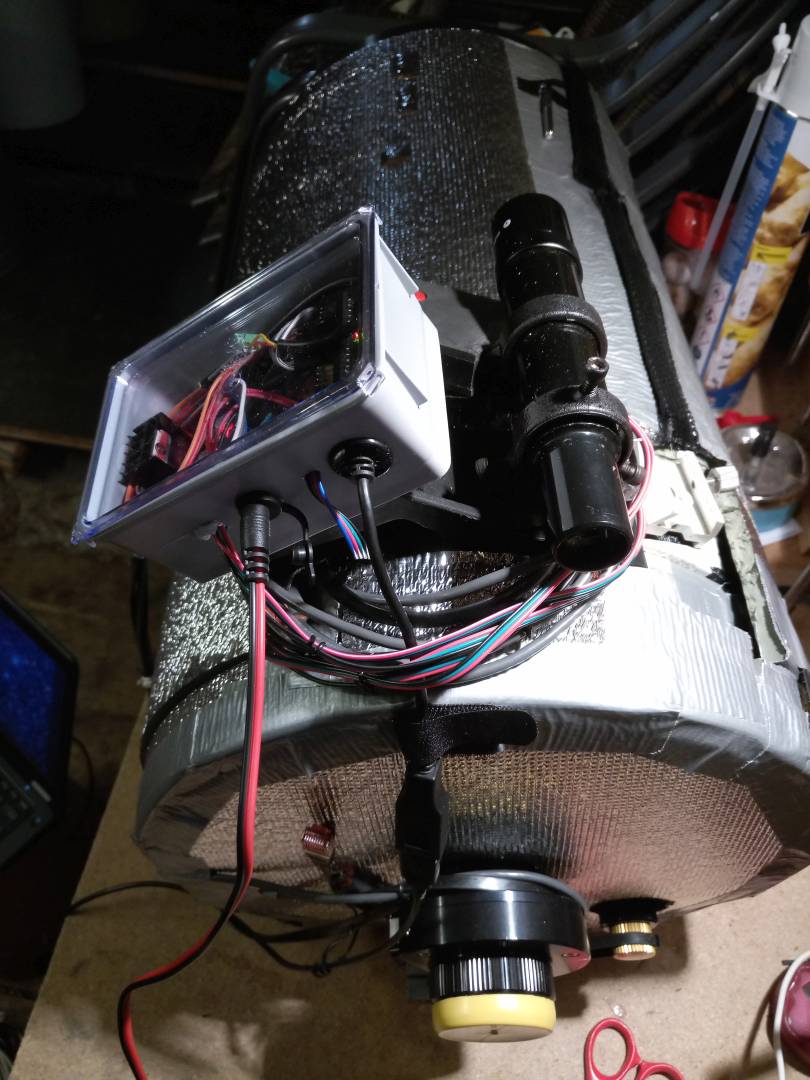
Leider hatte ich zu Beginn des Projektes den Aspekt der visuellen Beobachtung total ausser Acht gelassen und das Thema Handcontroller wurde zum meinem neuen Sorgenkind. Eigentlich eine simple Sache, sofern das Know-How vorhanden wäre, doch ich musste auch hier auf eine „All-in-One“ Fertiglösung zurückgreifen in Form von Robotdyn Push Buttons. Den Code schrieb mir ein Bekannter um, da ich (immer noch) blutiger Anfänger mit der Programmiersprache „Sketch“ bin. Der Bau des zweiten Motorfokus für mein C11 aus den 90er Jahren mit einem Starlight Feathertouch verlief wesentlich schneller, aber die Knackpunkte waren erneut die Wahl des richtigen Zahnrads und des Zahnriemens.
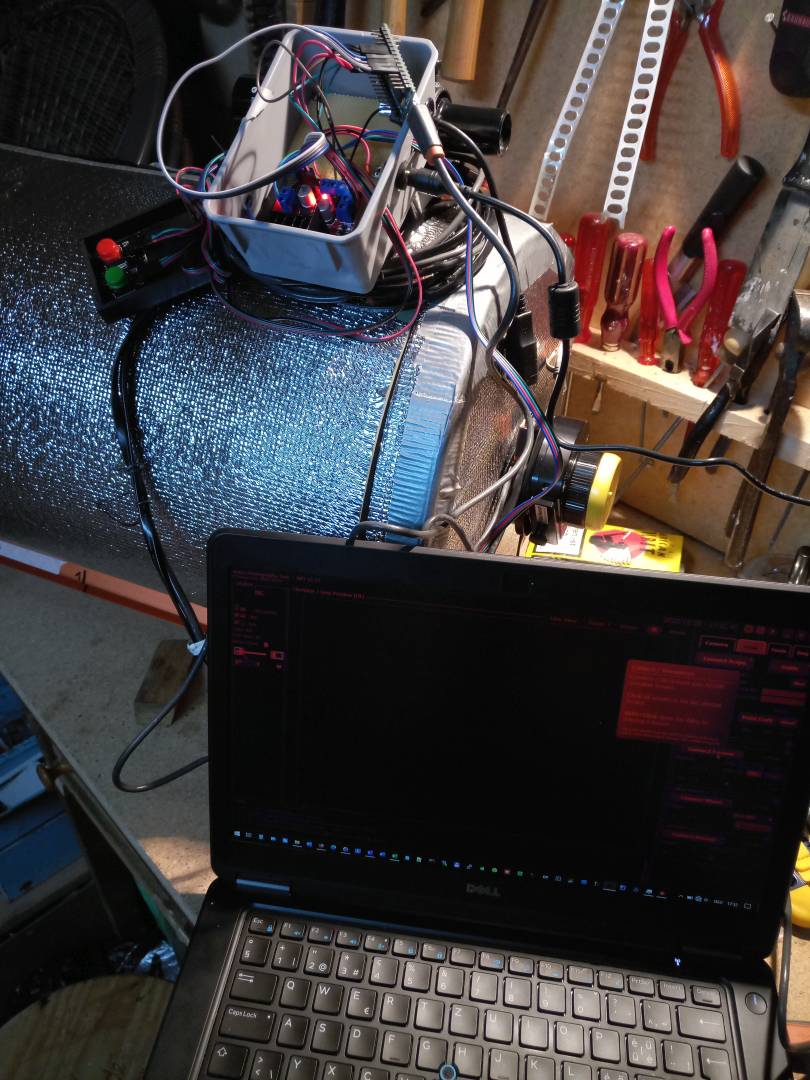
Der erste Praxistest konnte ich im Oktober 2022 durchführen und es funktionierte alles einwandfrei, auch wenn ich noch nicht alle Settings in APT/Ascom verstanden bzw. konfiguriert habe. Das entstandene Bild des Hantelnebels M27 ist in meiner Gallerie zu finden.
Grundsetting
- My Focuser Pro Software von Robert Brown
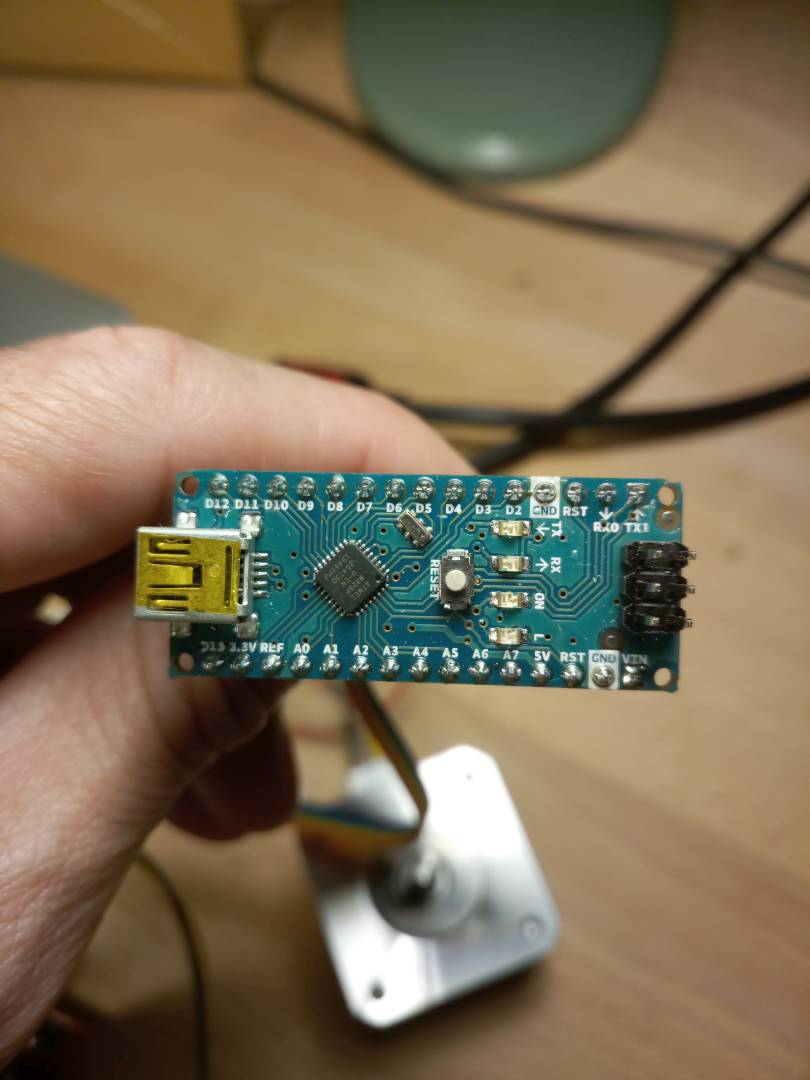
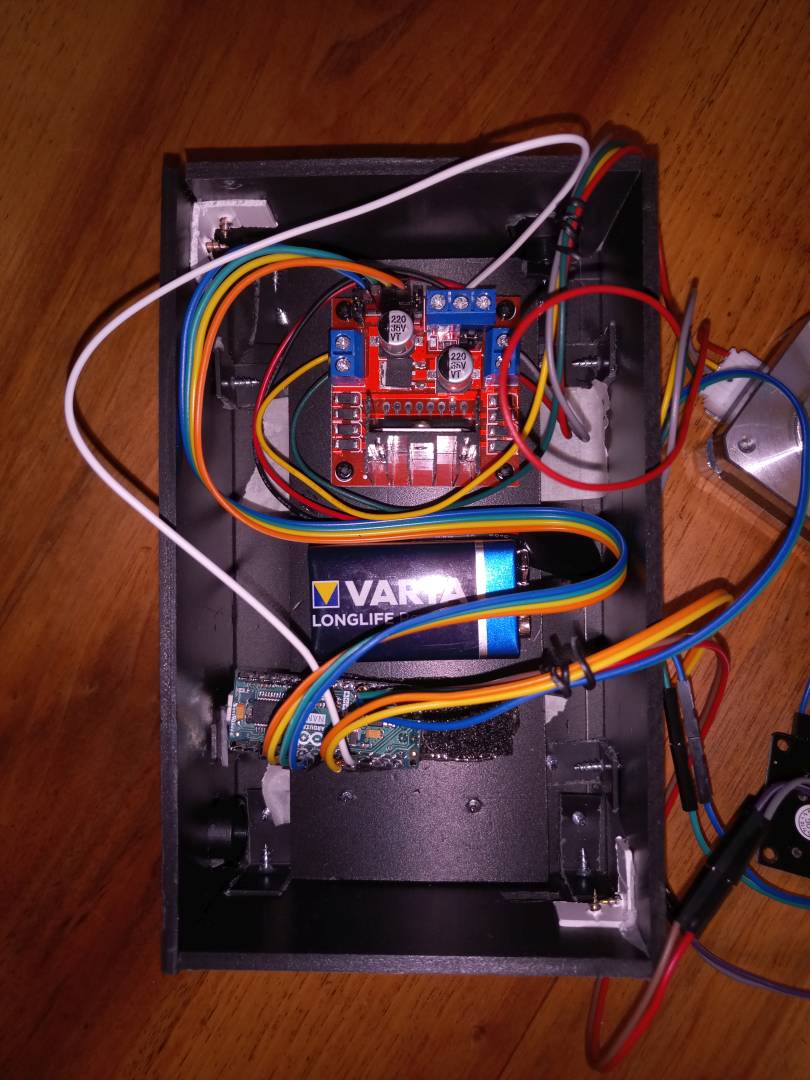
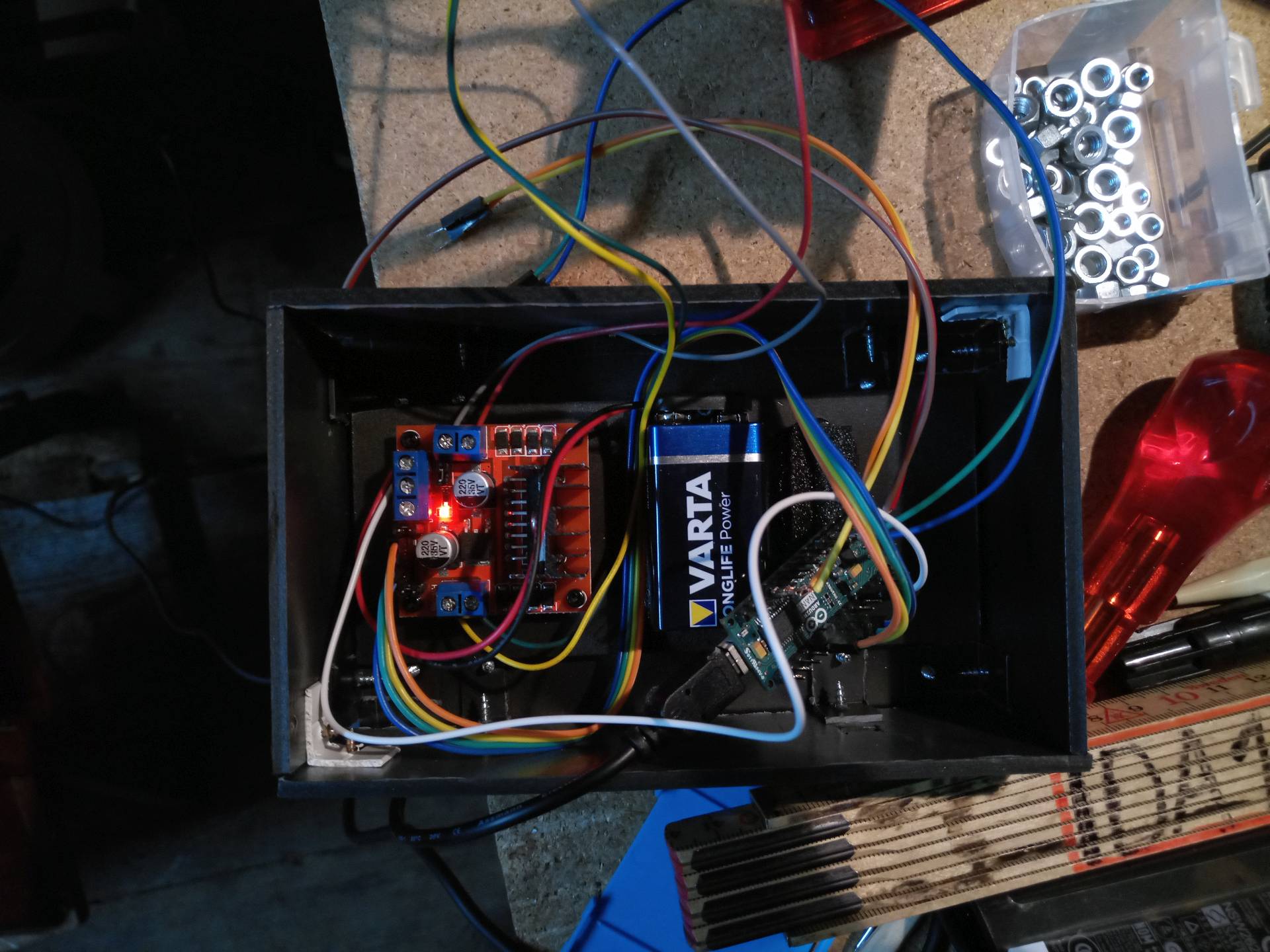
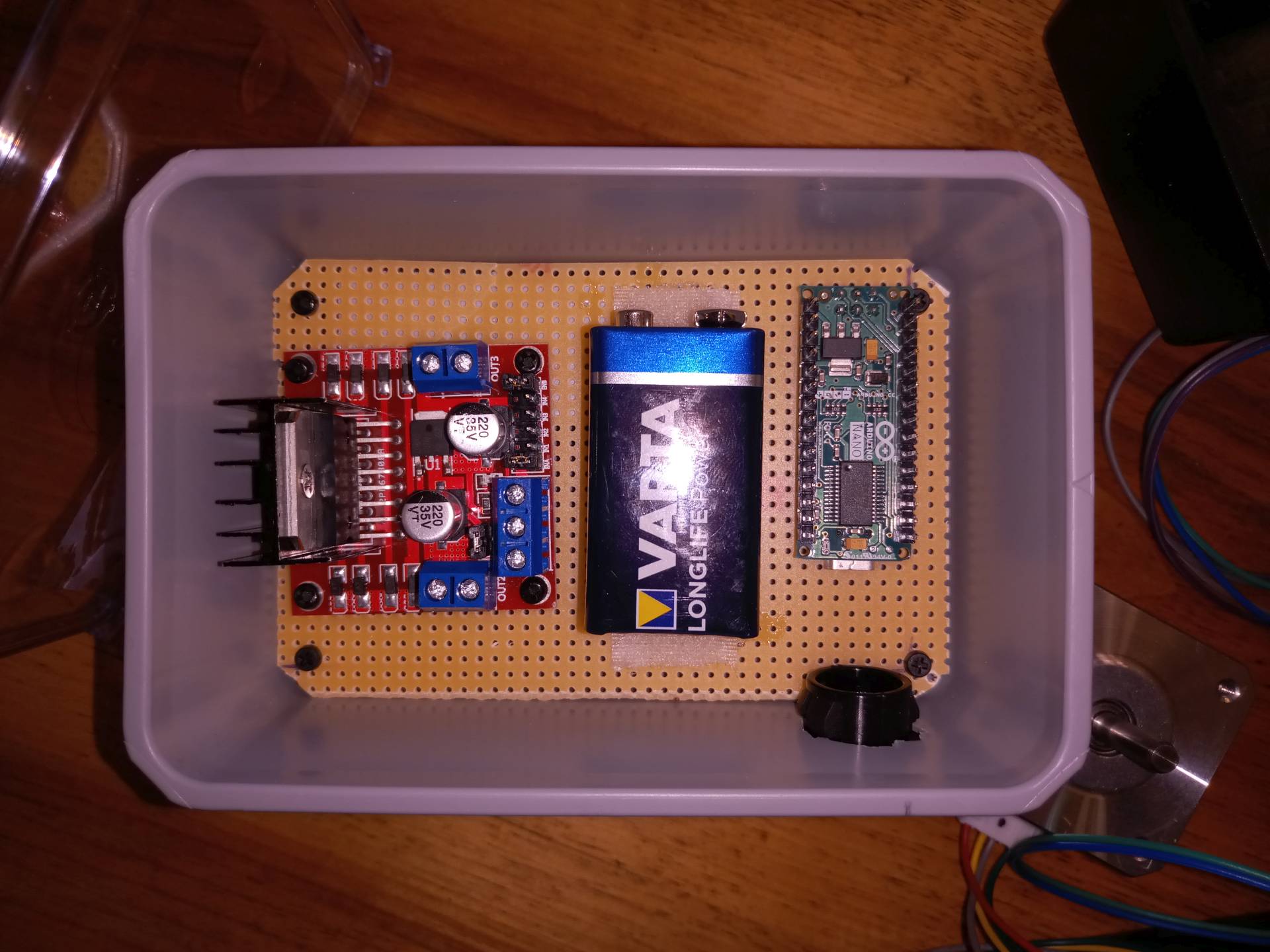
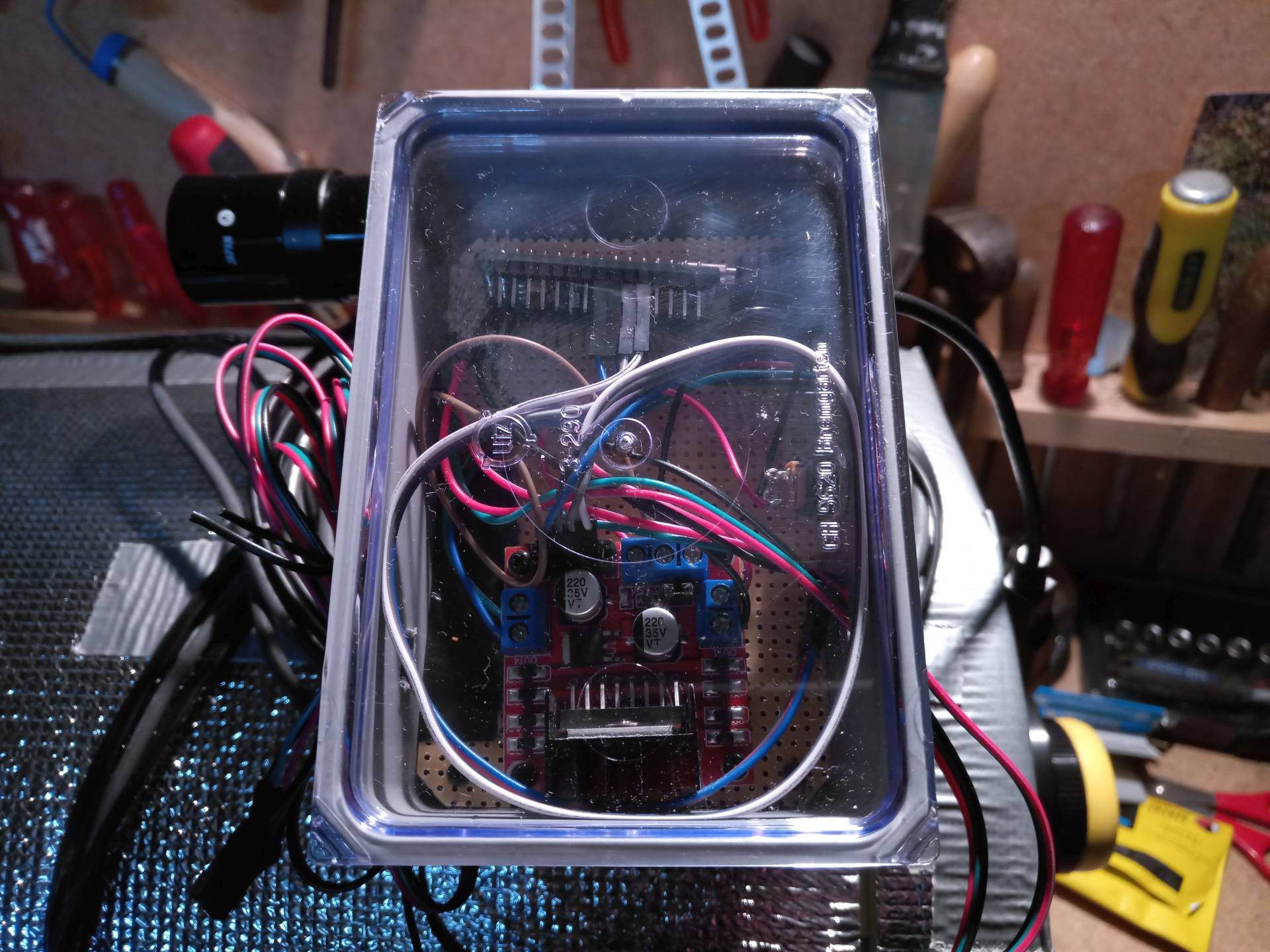
- Arduino Nano
- Nema17 Schrittmotor
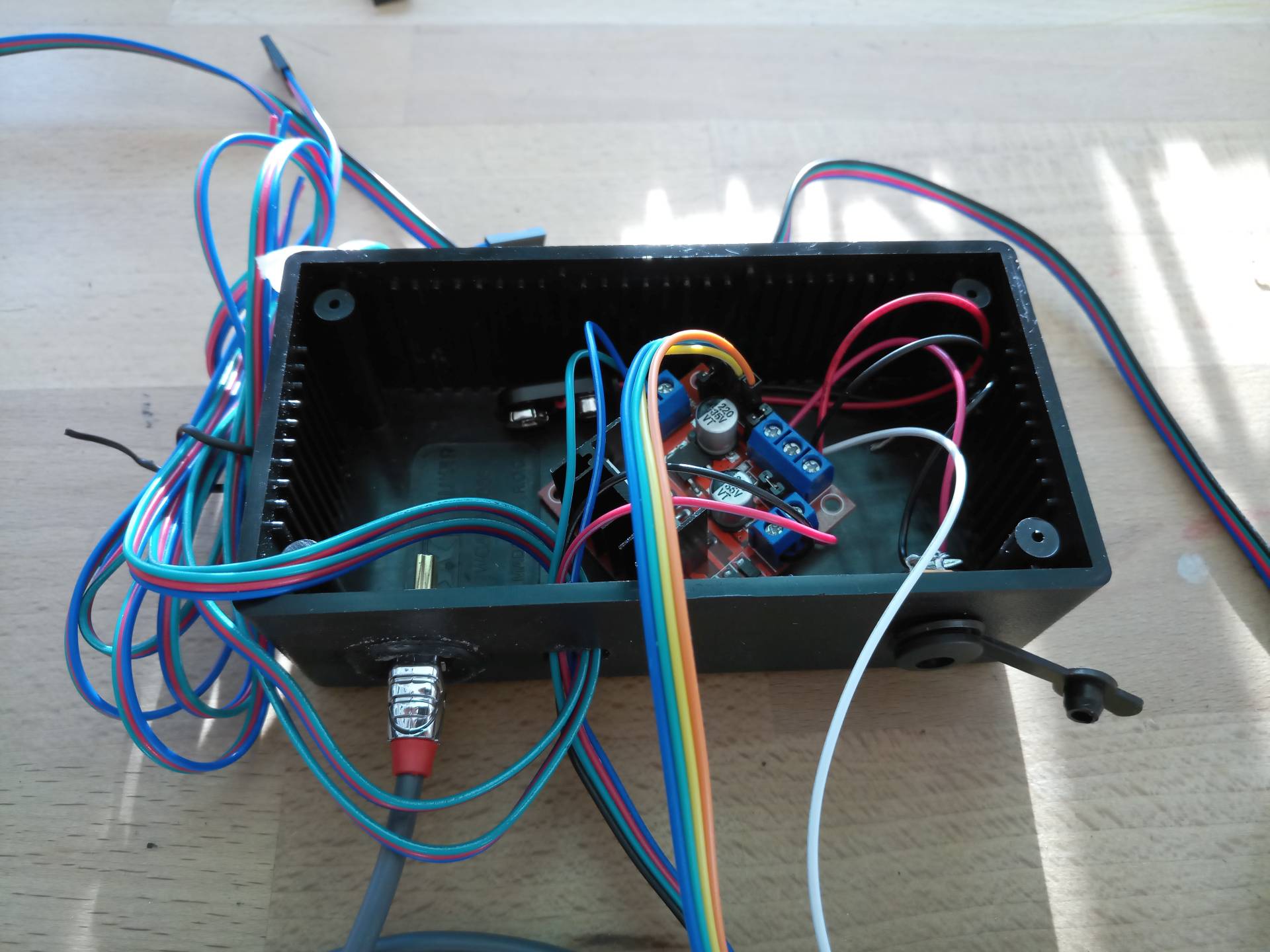
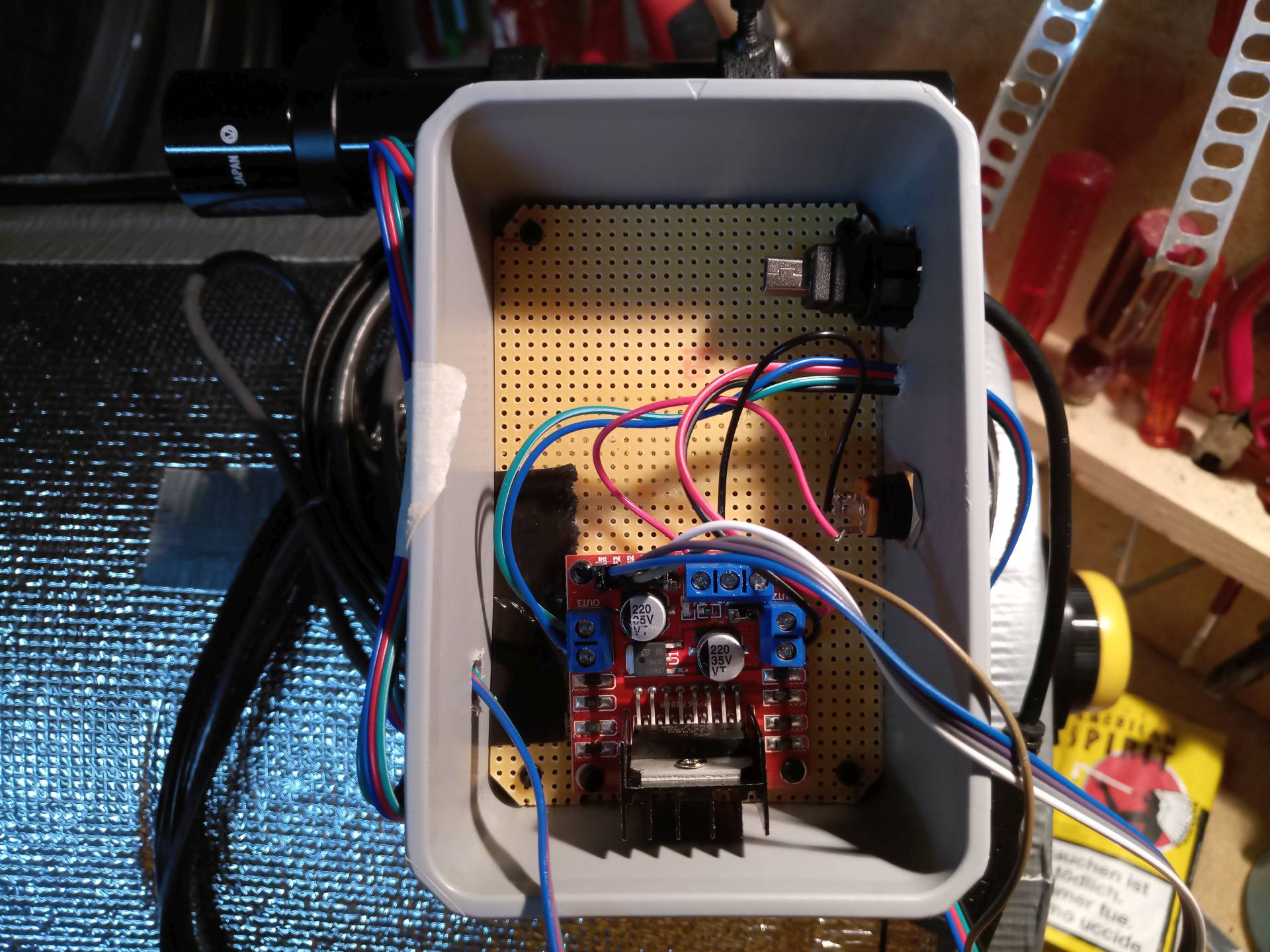
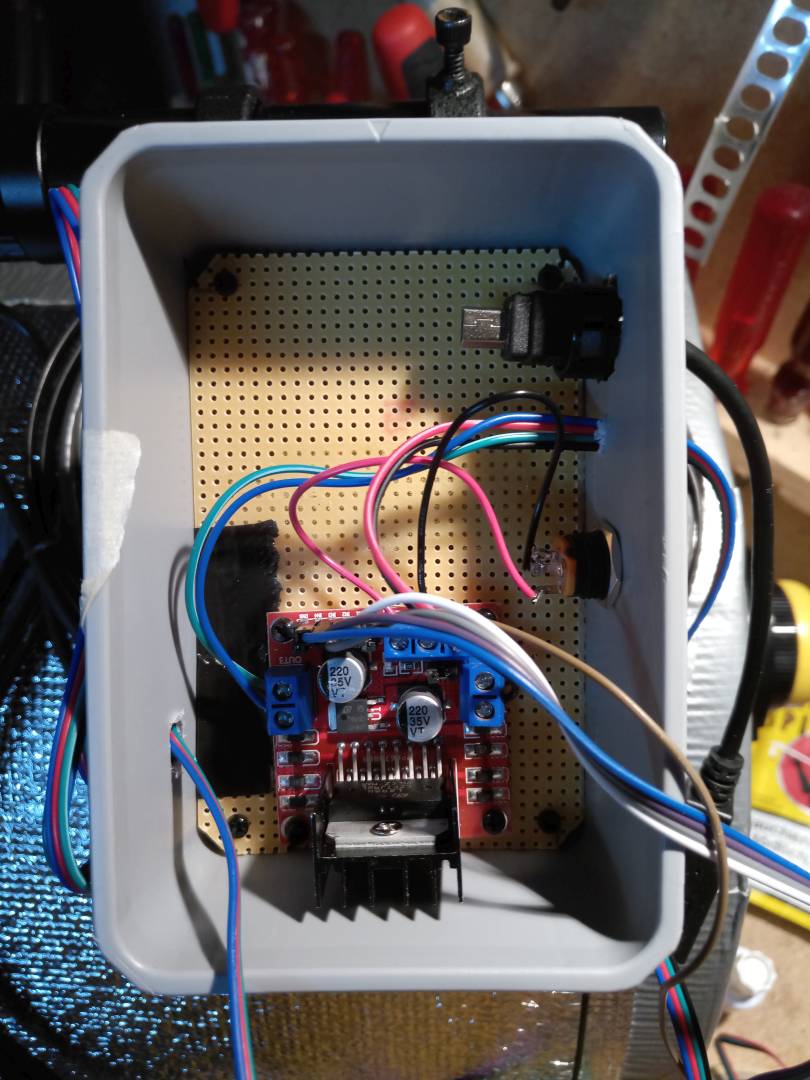
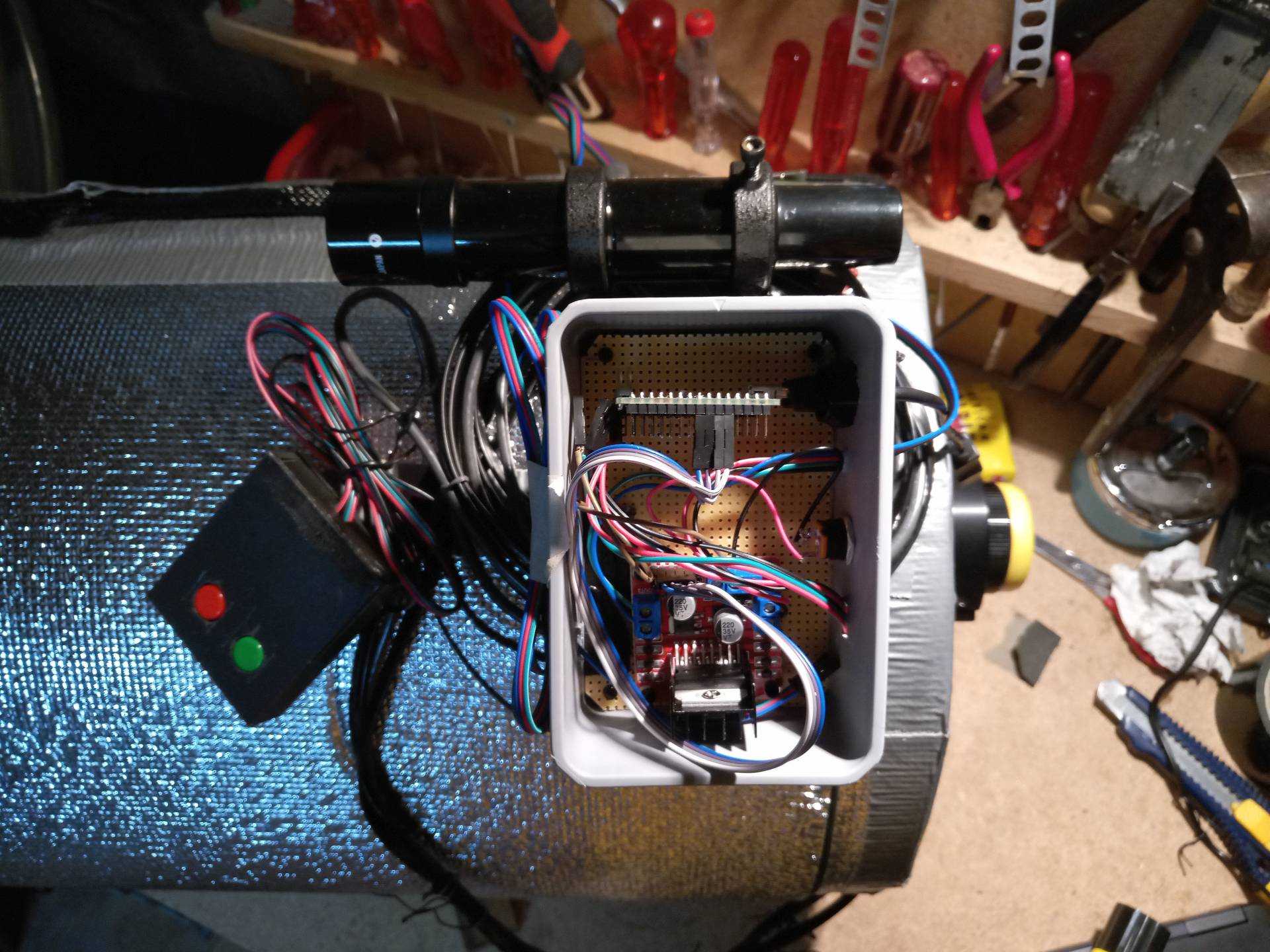
- L298N Motormodul/Driver Board
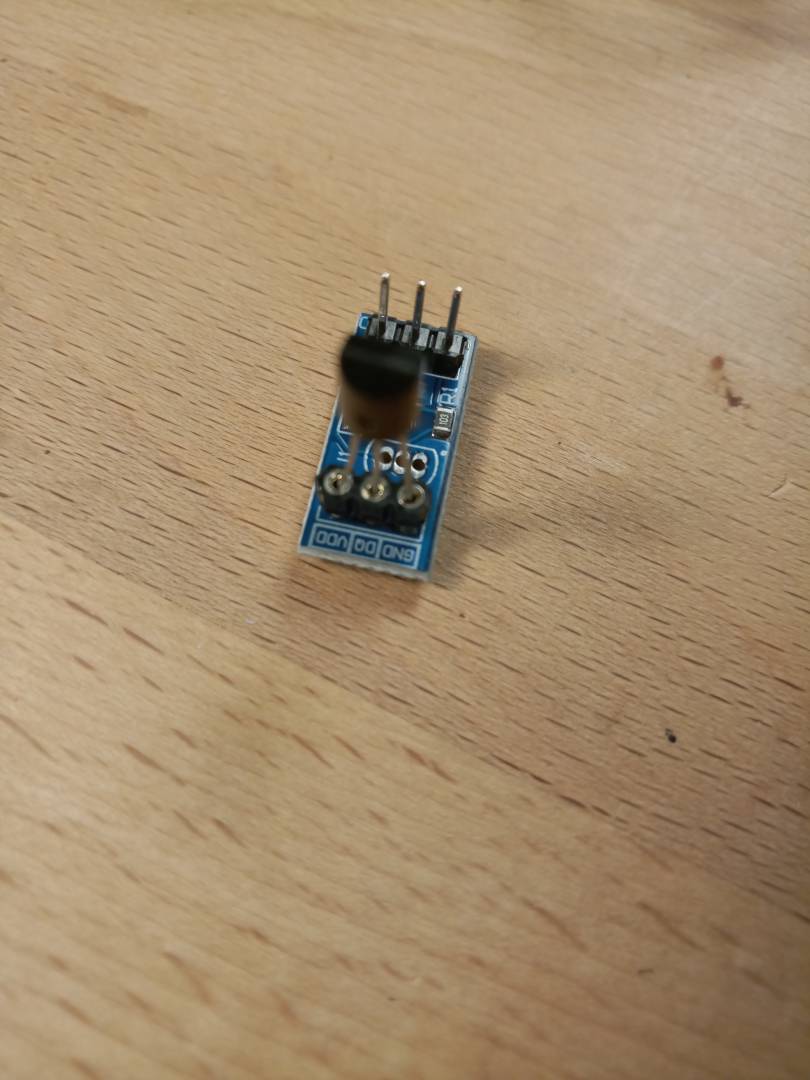
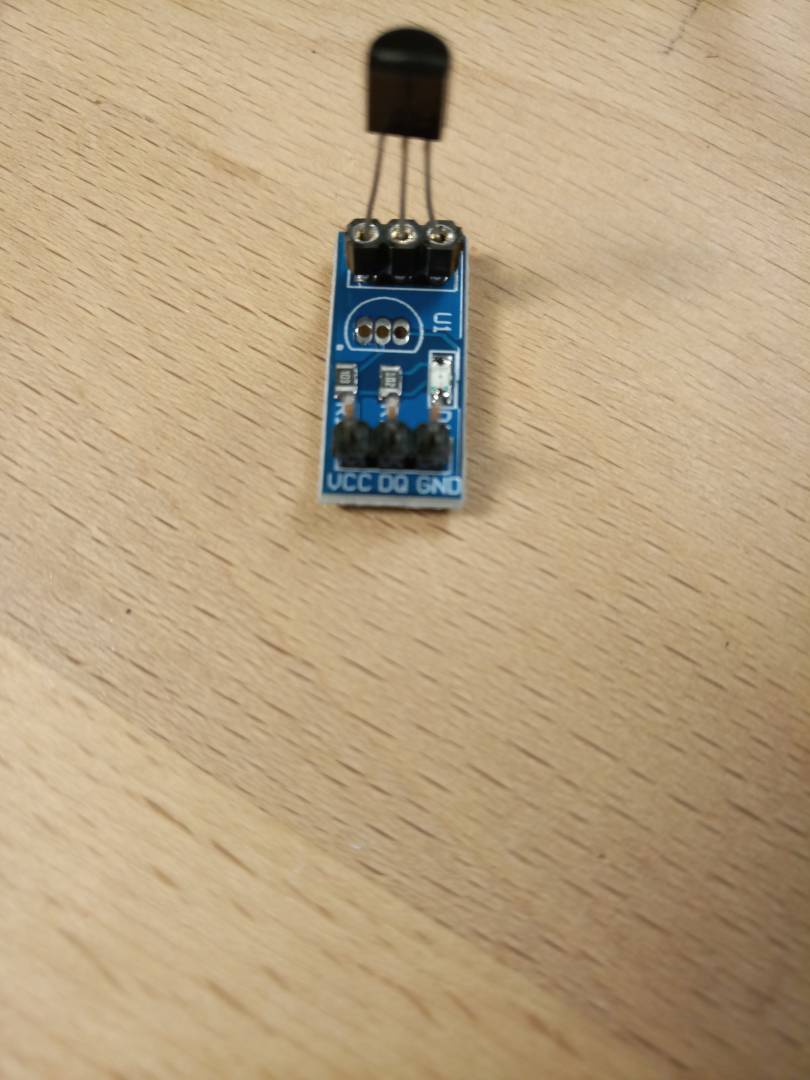
- Temperatursensor Modul für DS18B20
- Temperatursensor DS18B20
- Temperatursensor-Modul Set DS18B20
- Robotdyn Push Buttons




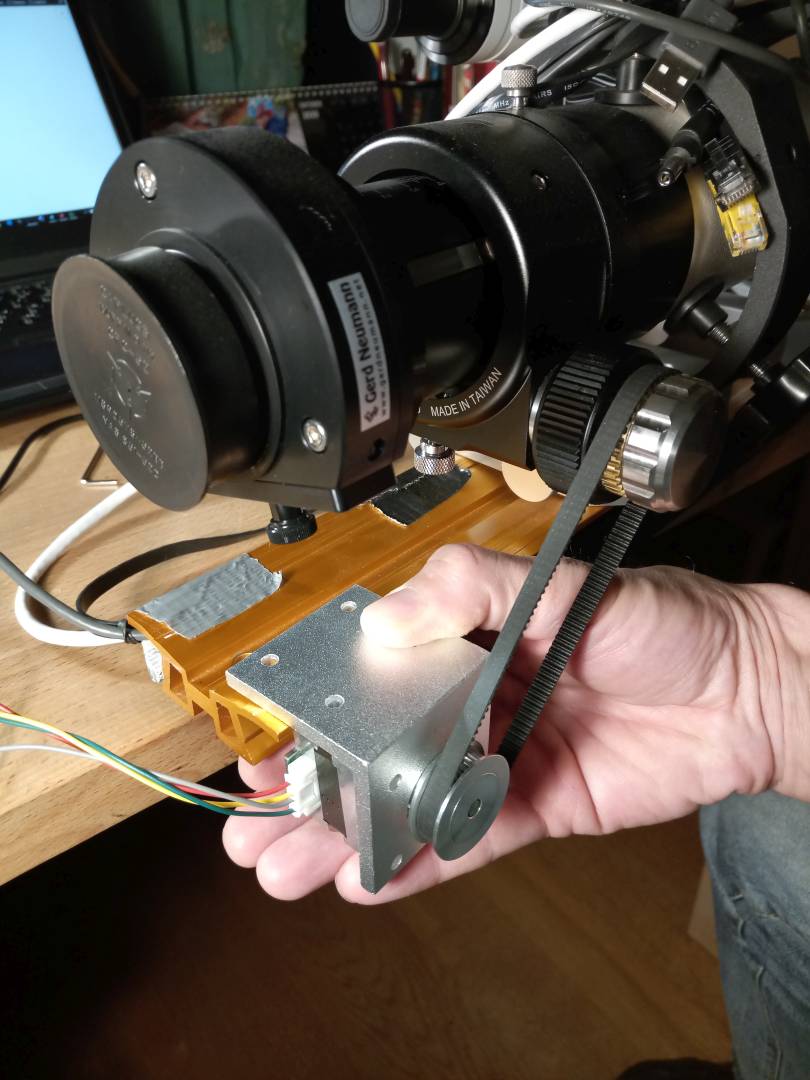
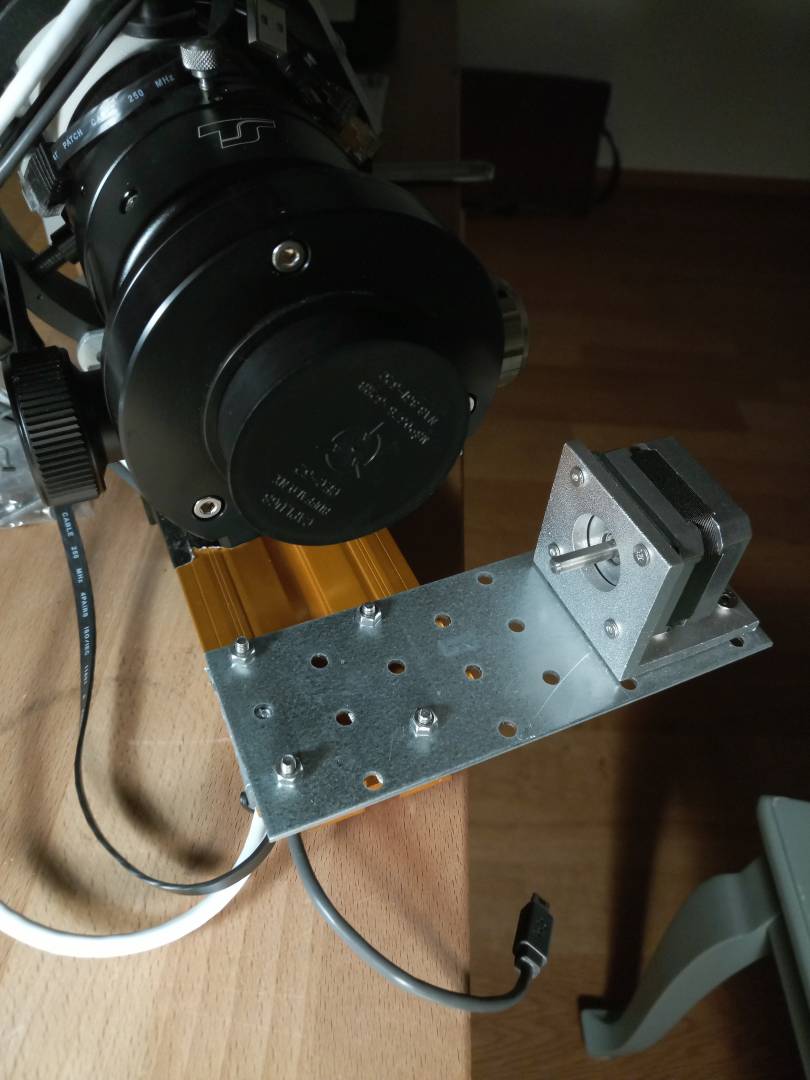
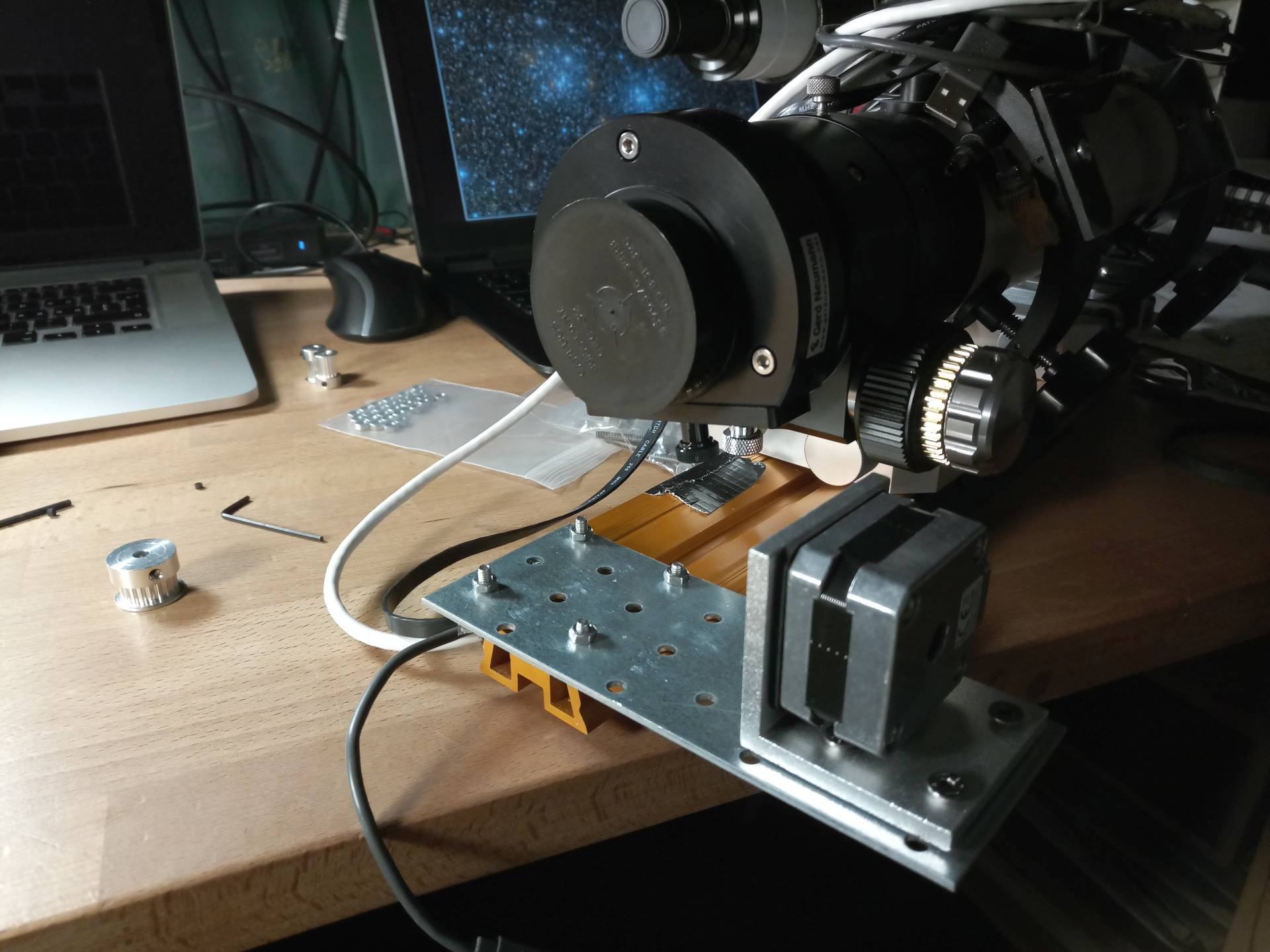
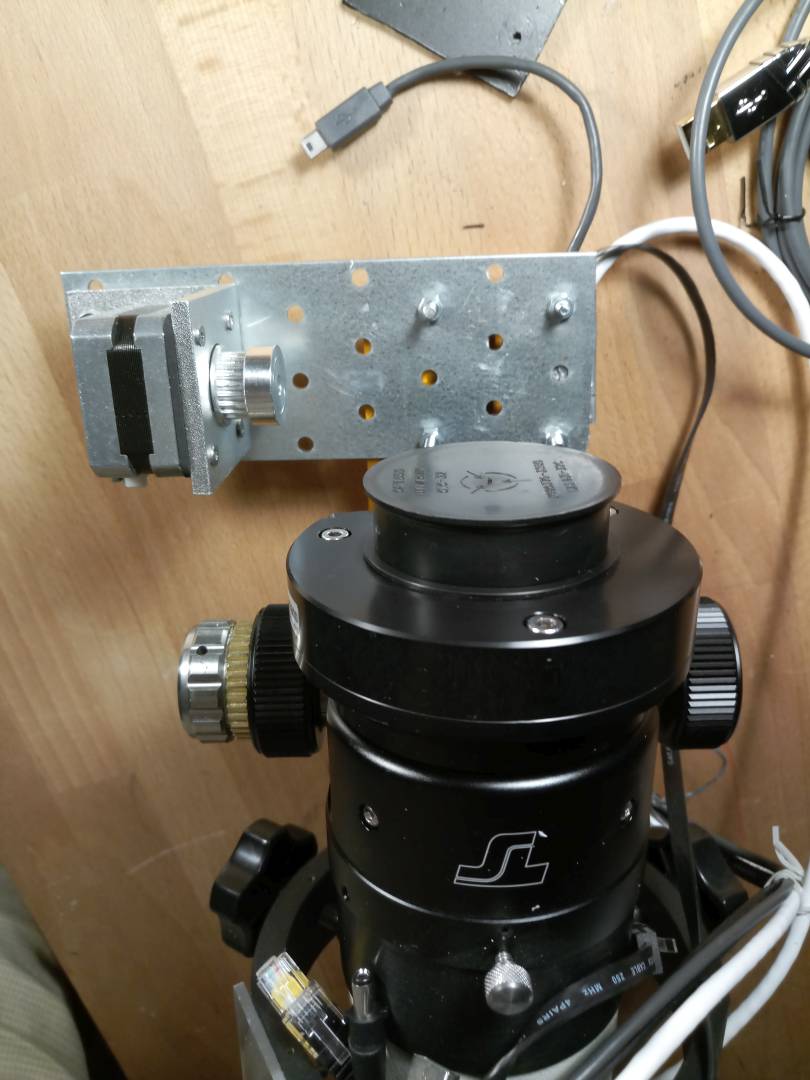
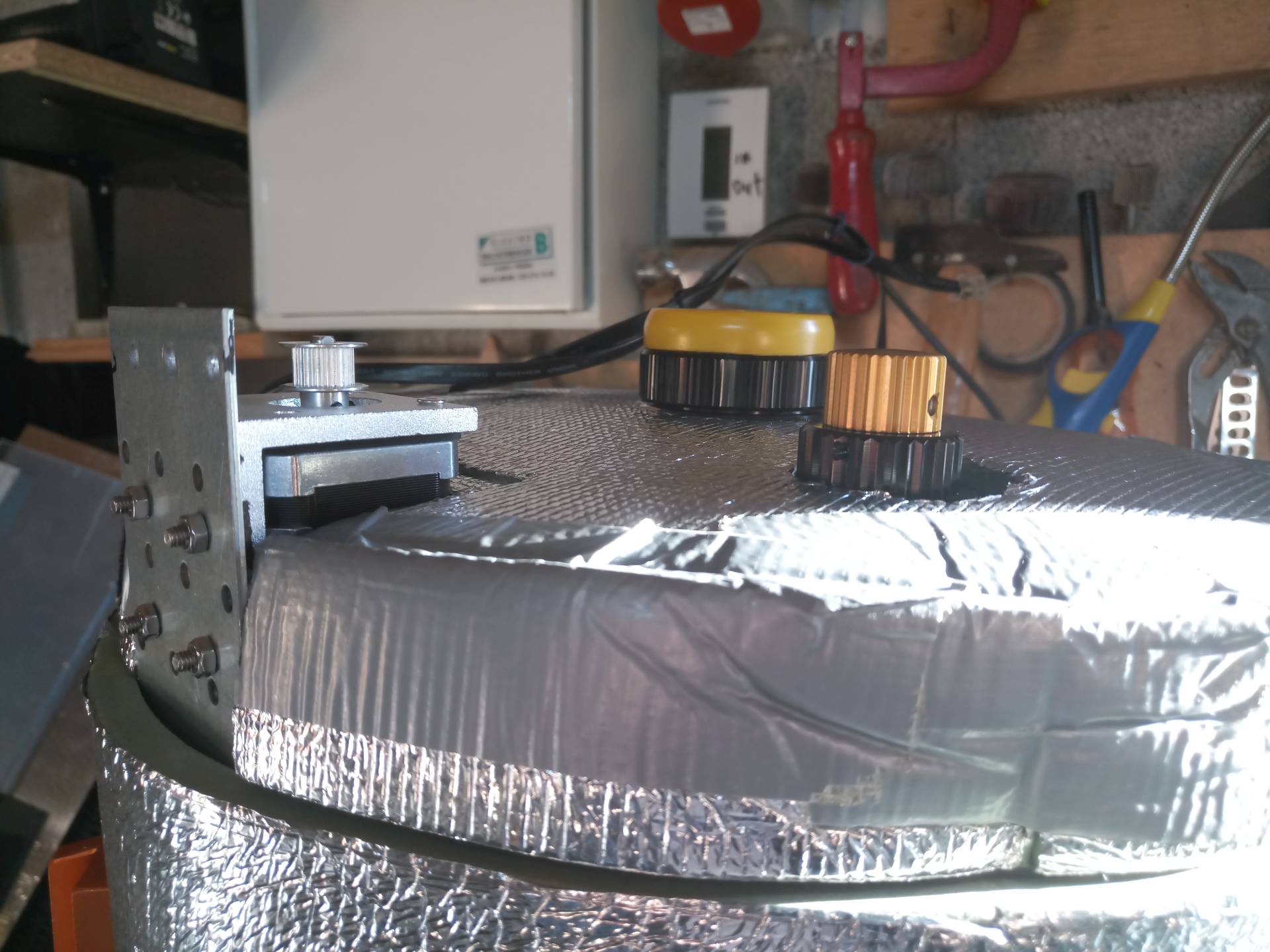
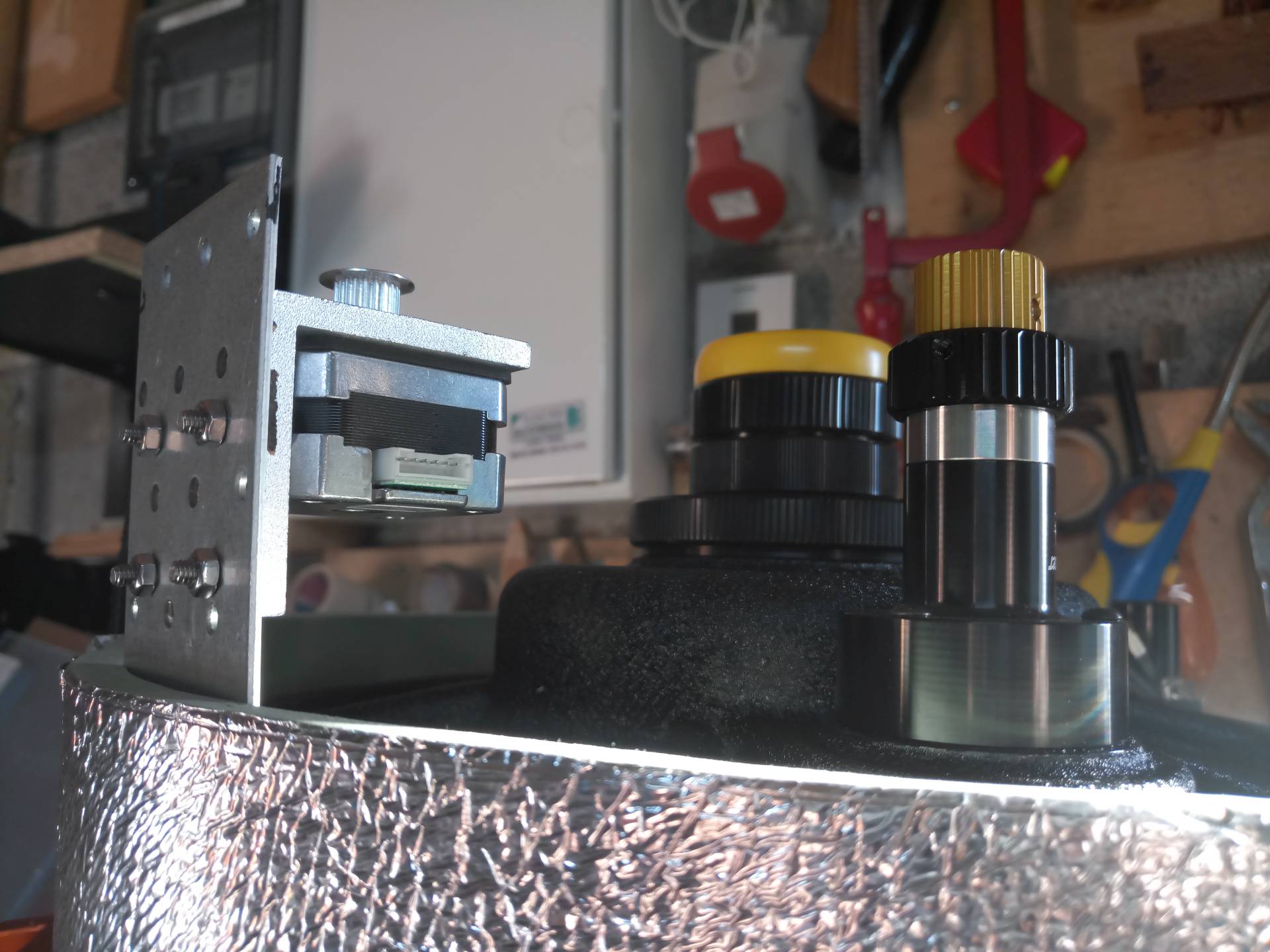
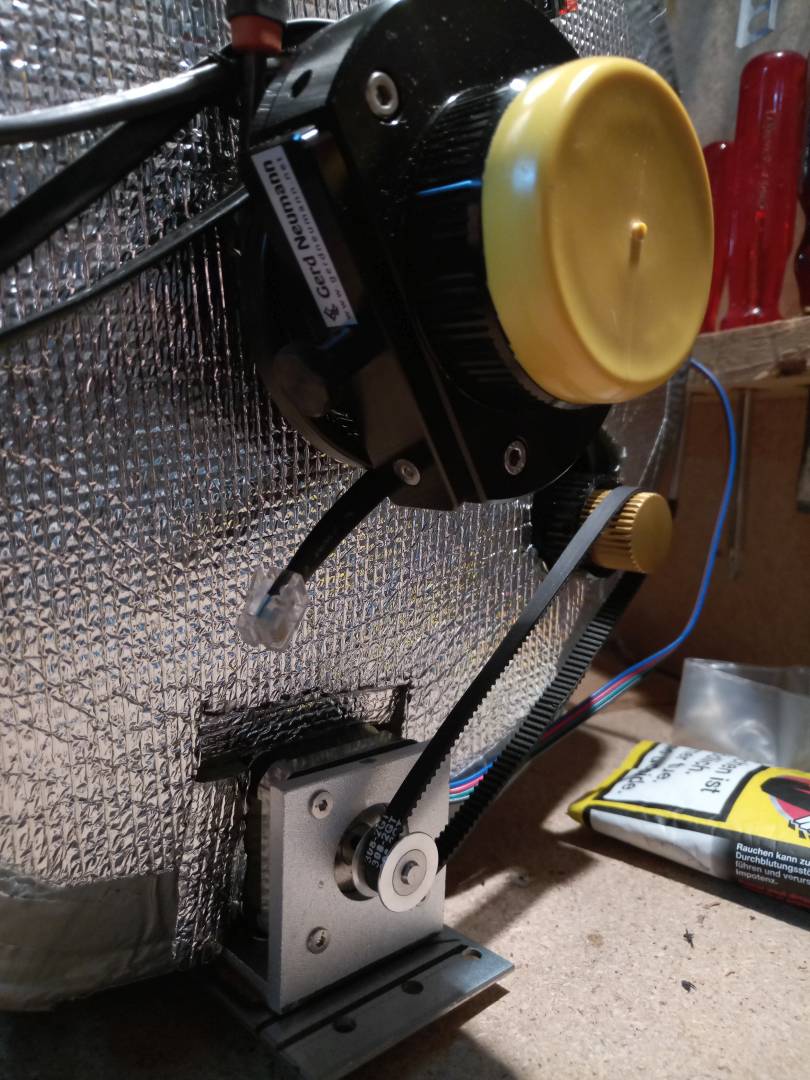
TeleVue Focuser – Motor
- Zahnriemen HTD-Profil, HTD-3M, 6mm breit
- GT3 Zahnrad 20 Zähne, 6mm Breite, 5mm Bohrung
- Schwingungsdämpfer 2mm
- Montageplatte Alu für Nema 17
- Flachstahl
- Senkschrauben
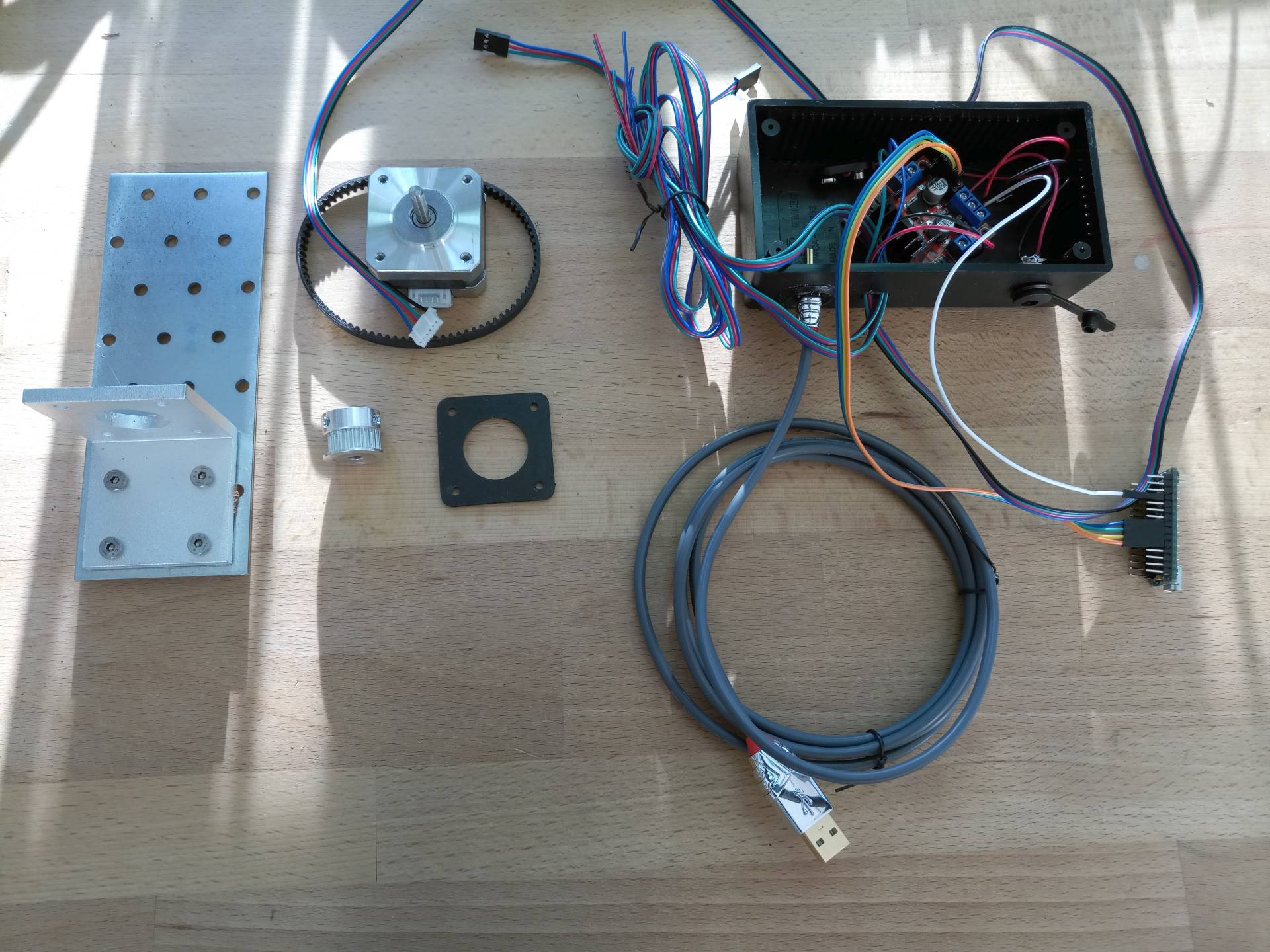
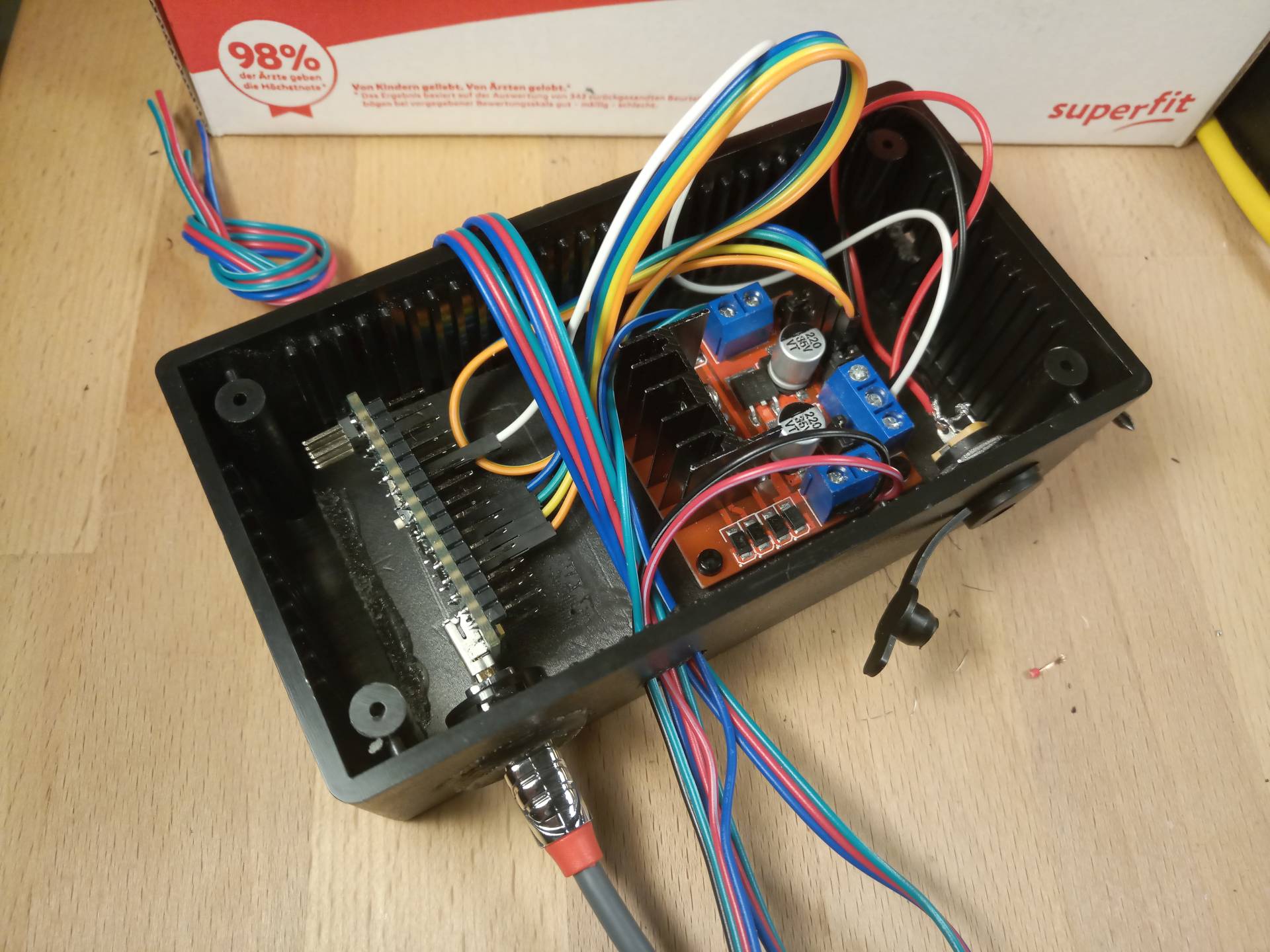
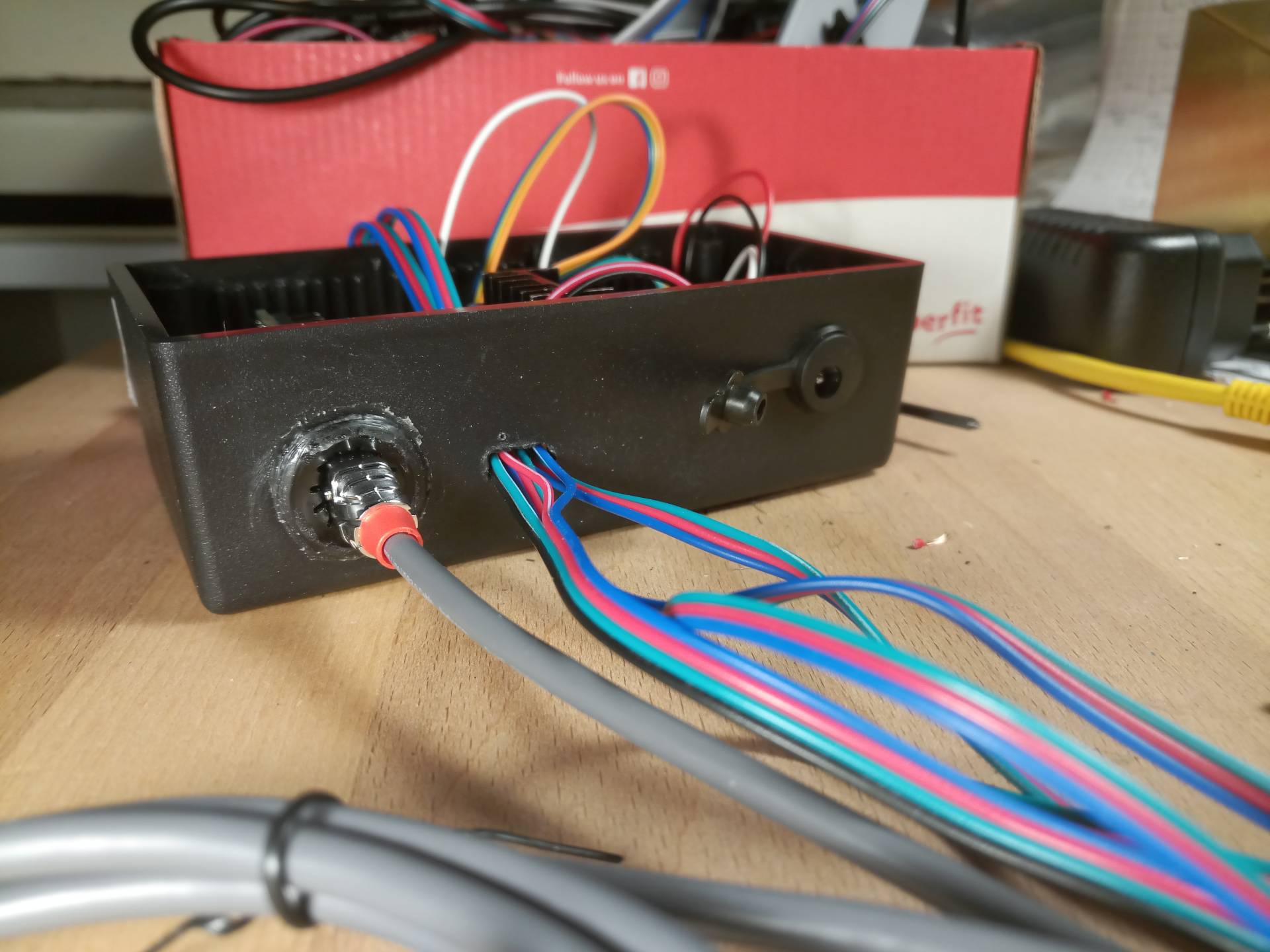
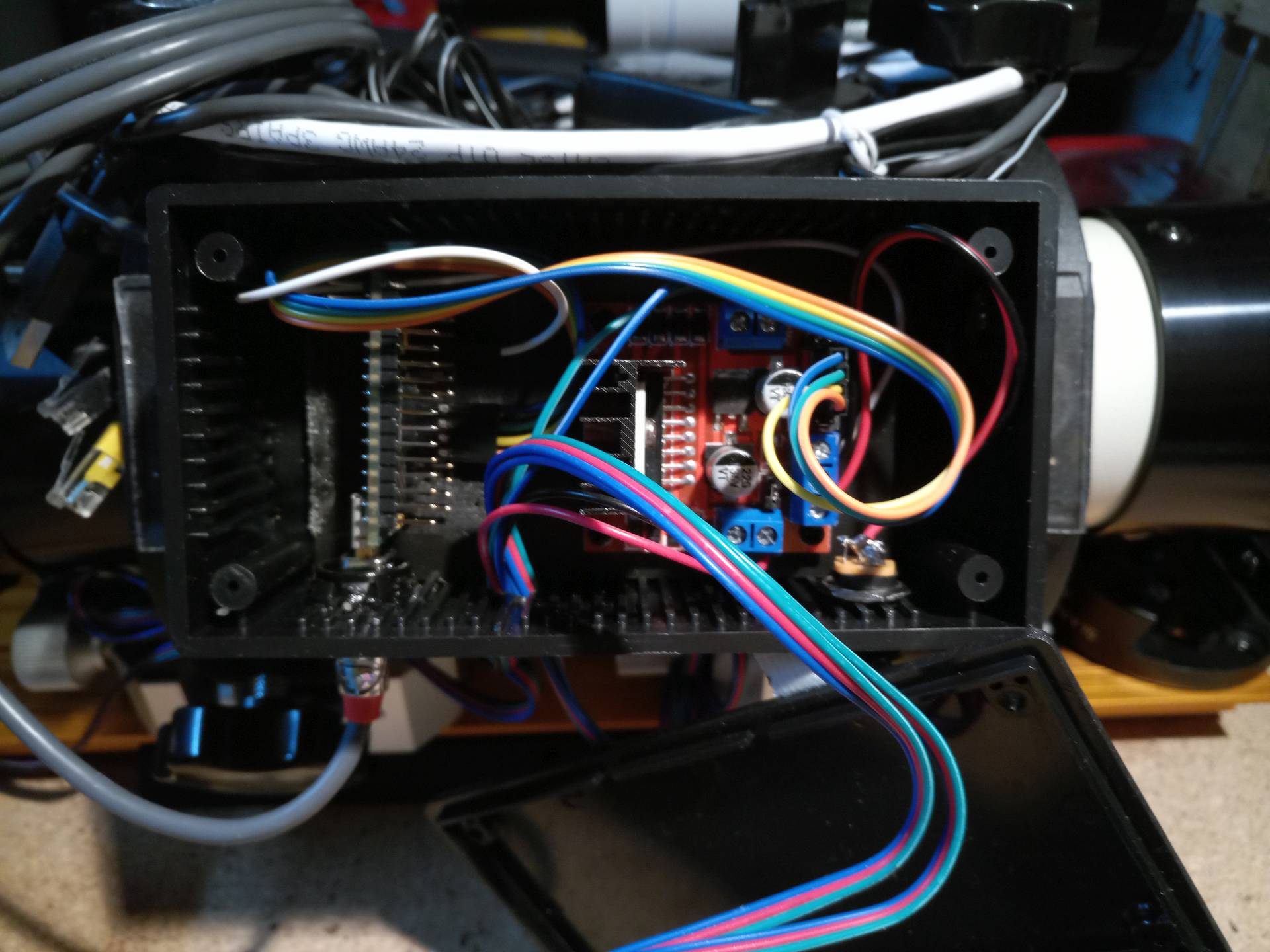
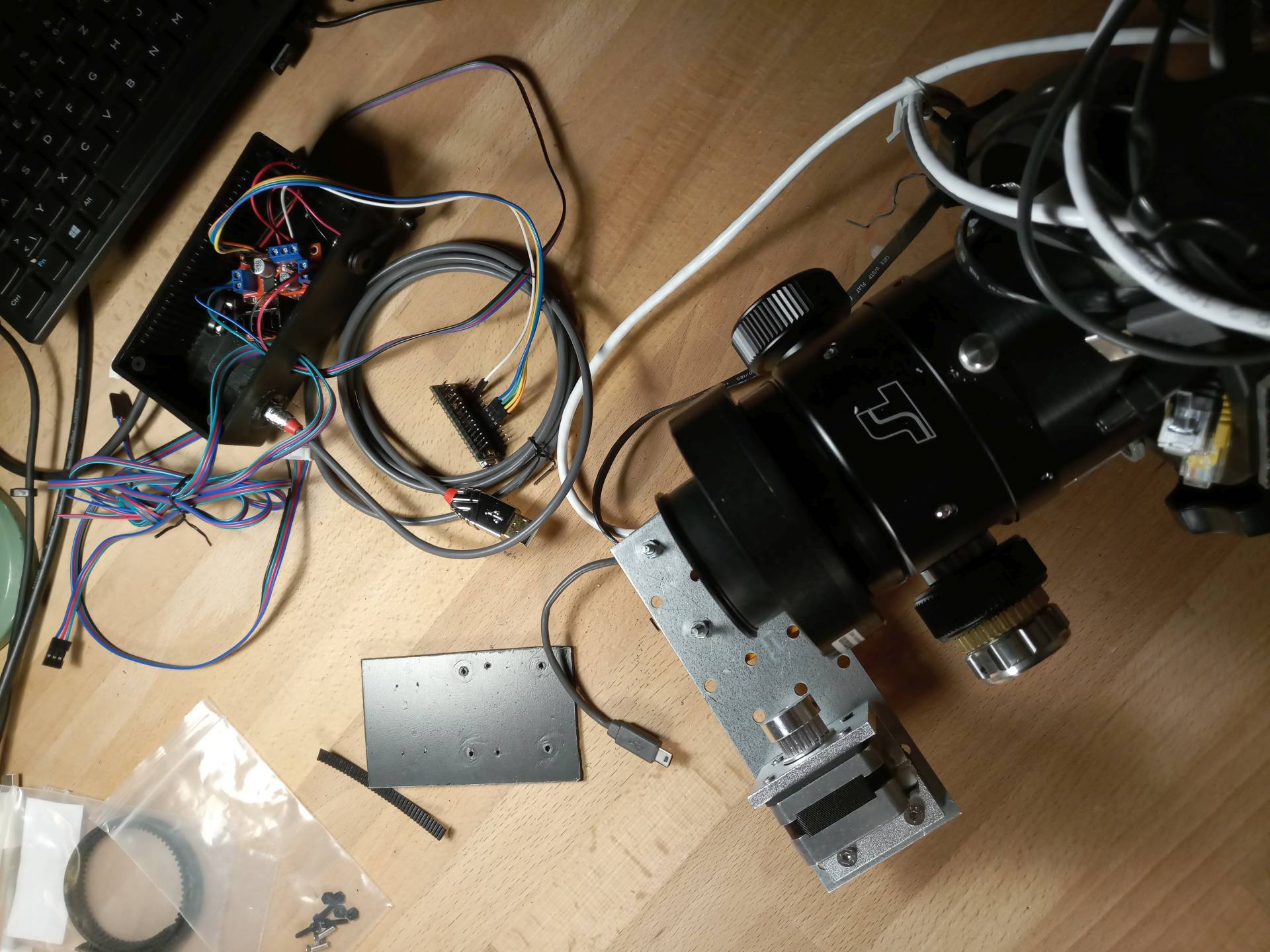
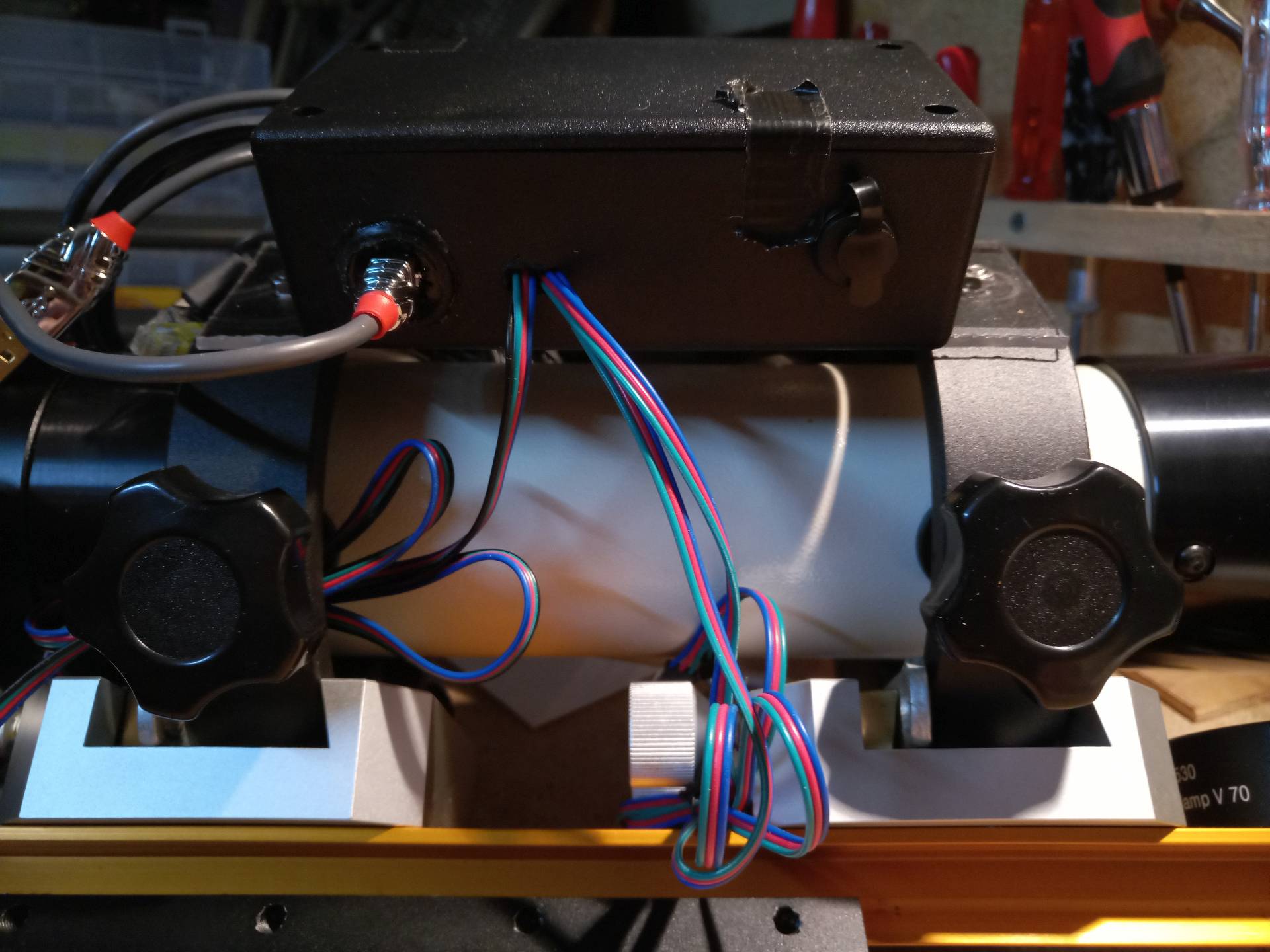
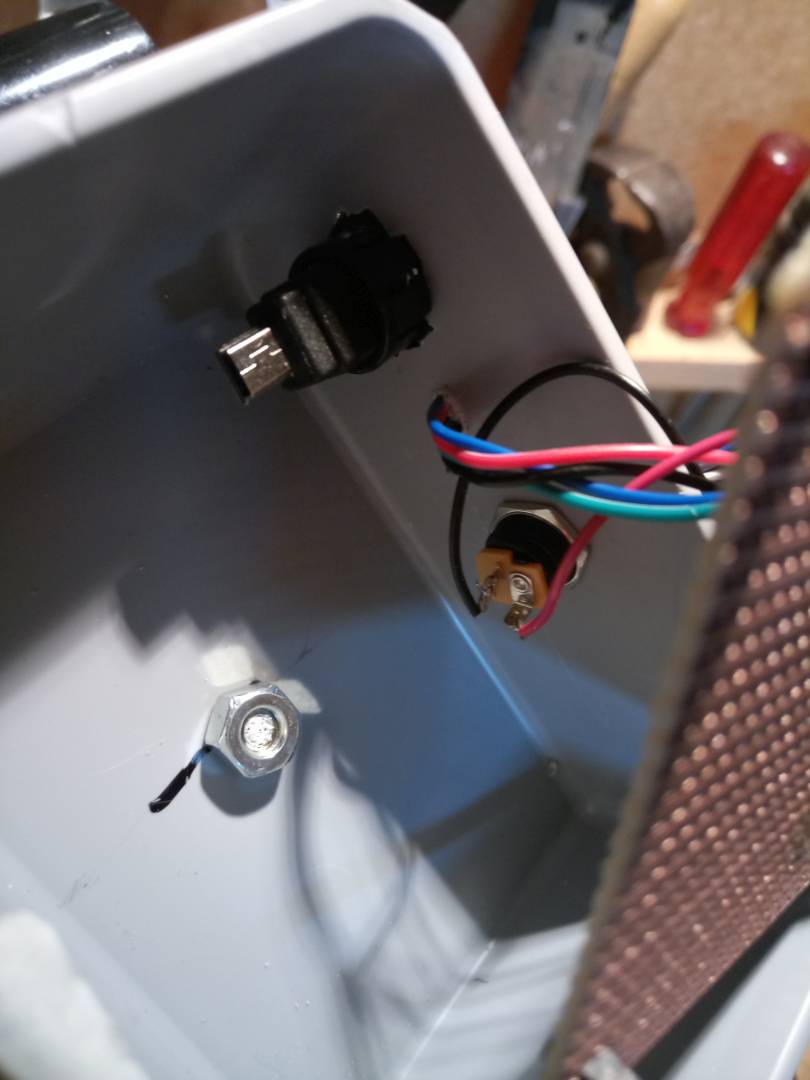
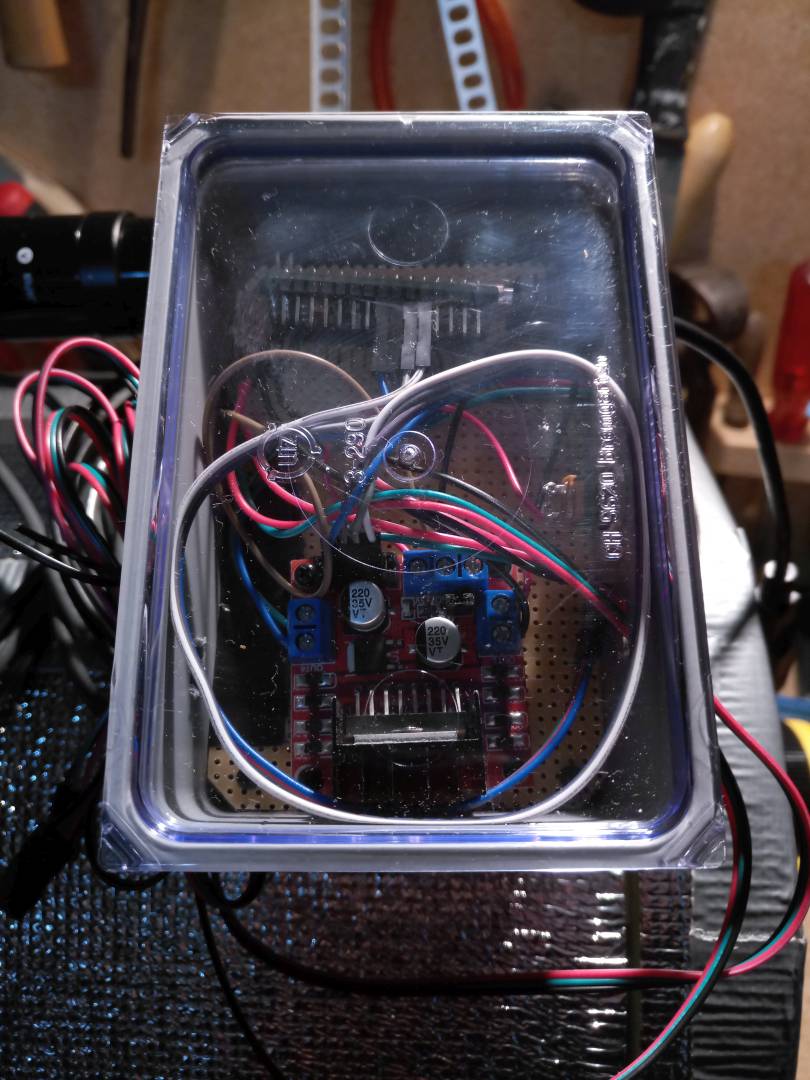
TeleVue Focuser – Elektronik
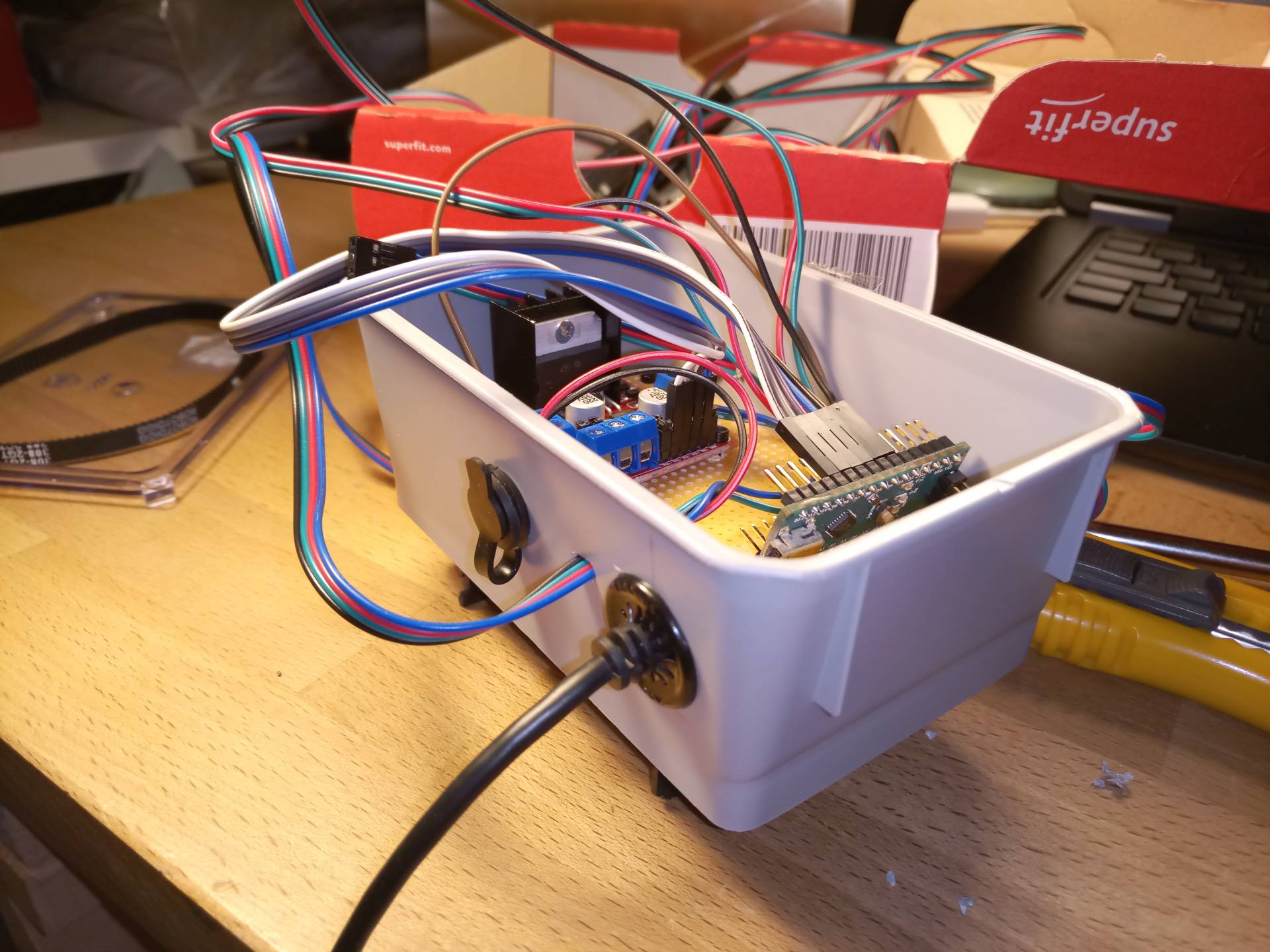
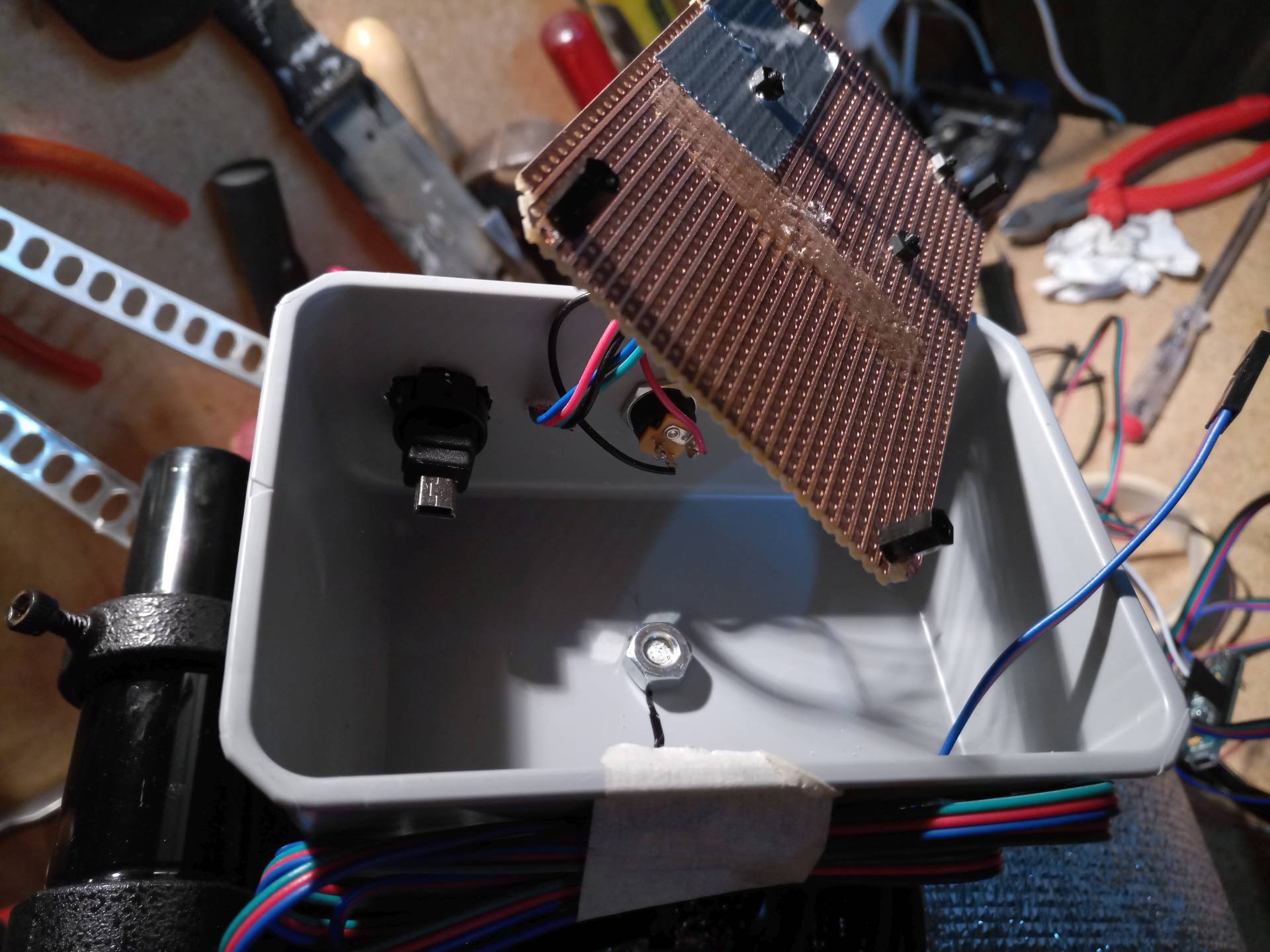
- DC Einbaubuchse 5.5mm/2.1mm
- USB Kabel
- Kabeldurchführungen
- Gehäuse für Elektronik
- Jumperkabel Dupont
- Verlängerung Schrittmotorkabel
- Steckernetzteil 5V DC 3000mA
- Niedervolt-Verlängerungskabel 5.5mm/2.1.mm






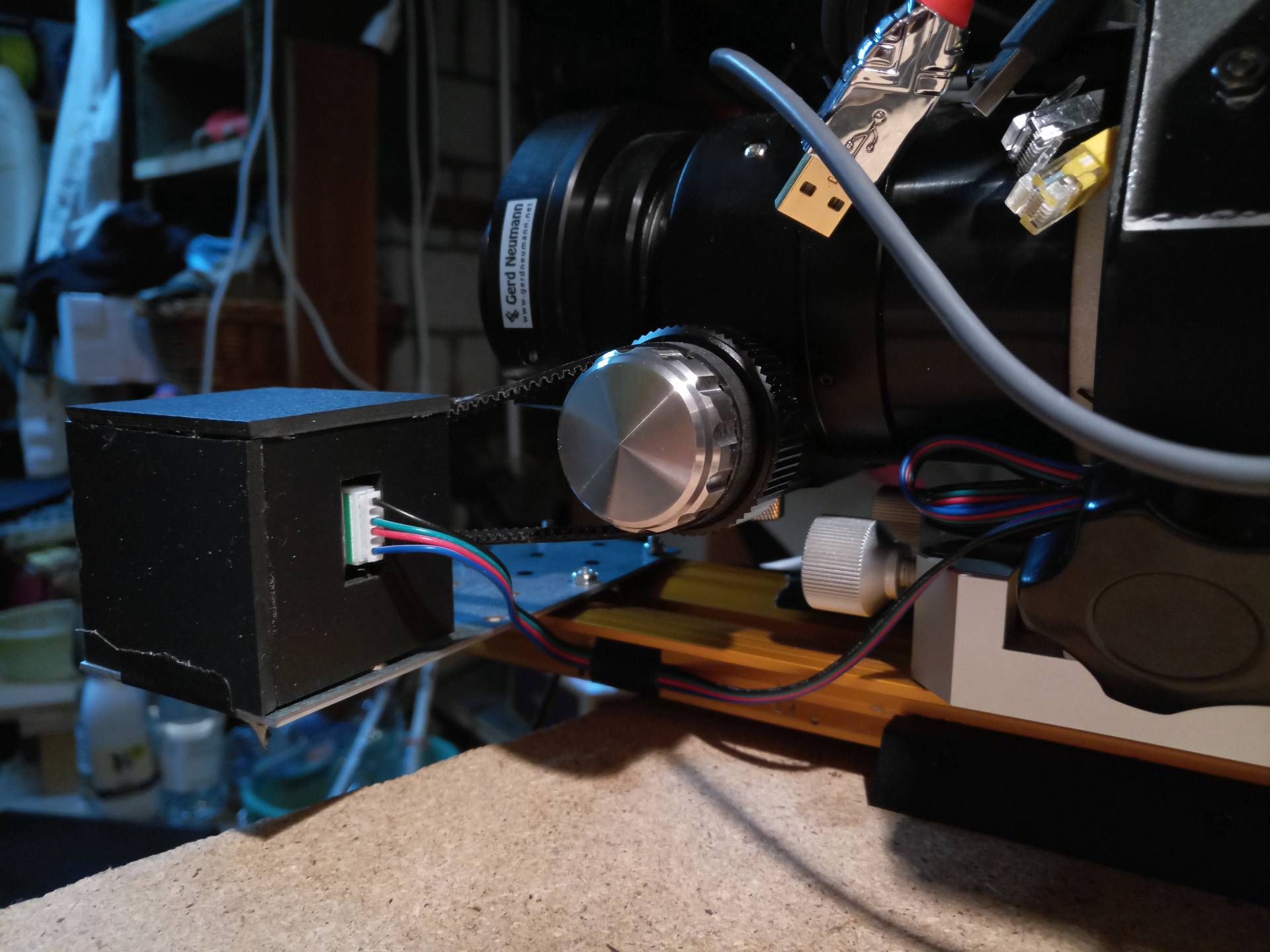

C11 Focuser – Motor
- GT2 Zahnriemen 6mm breit
- GT2 Riemenscheibe 20 Zähne, 6mm Breite, 5mm Bohrung
- Schwingungsdämpfer 2mm
- Montageplatte Alu für Nema 17
- Flachstahl
- Senkschrauben
C11 Focuser – Elektronik
- DC Einbaubuchse 5.5mm/2.1mm
- USB Kabel
- Kabeldurchführungen
- Gehäuse für Elektronik
- Jumperkabel Dupont
- Verlängerung Schrittmotorkabel
- Steckernetzteil 5V DC 3000mA
- Niedervolt-Verlängerungskabel 5.5mm/2.1.mm
- Lochrasterplatine













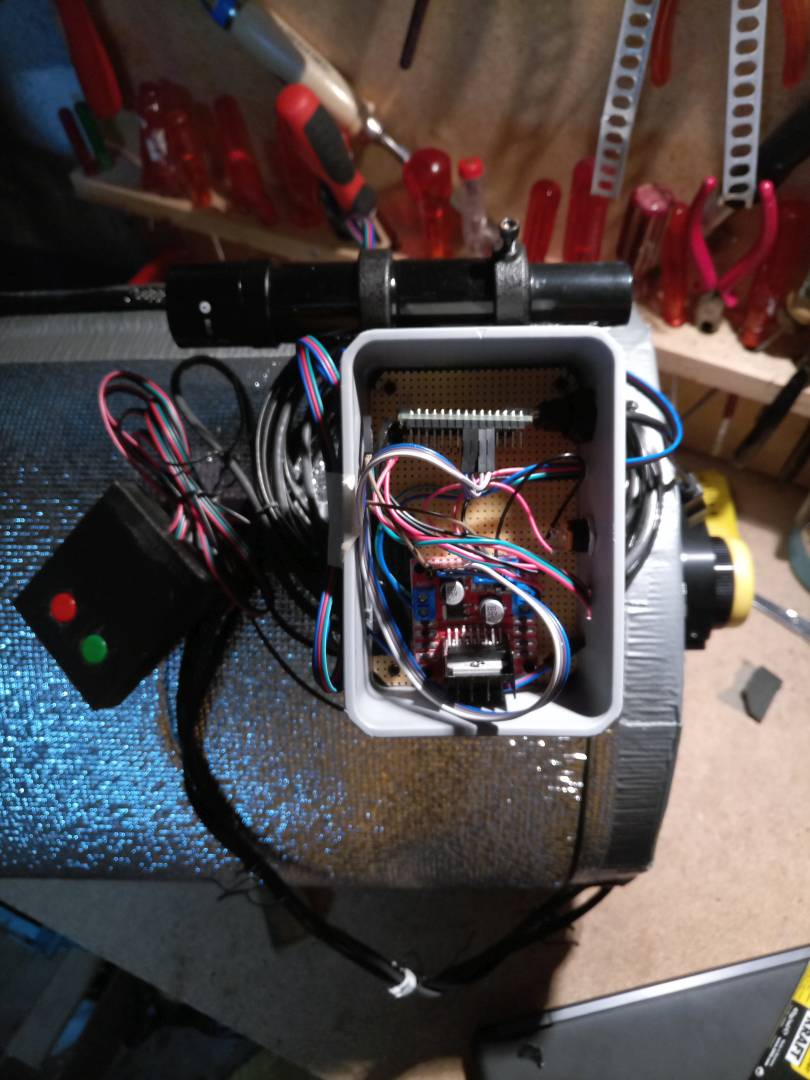






Schaltzentrale v2

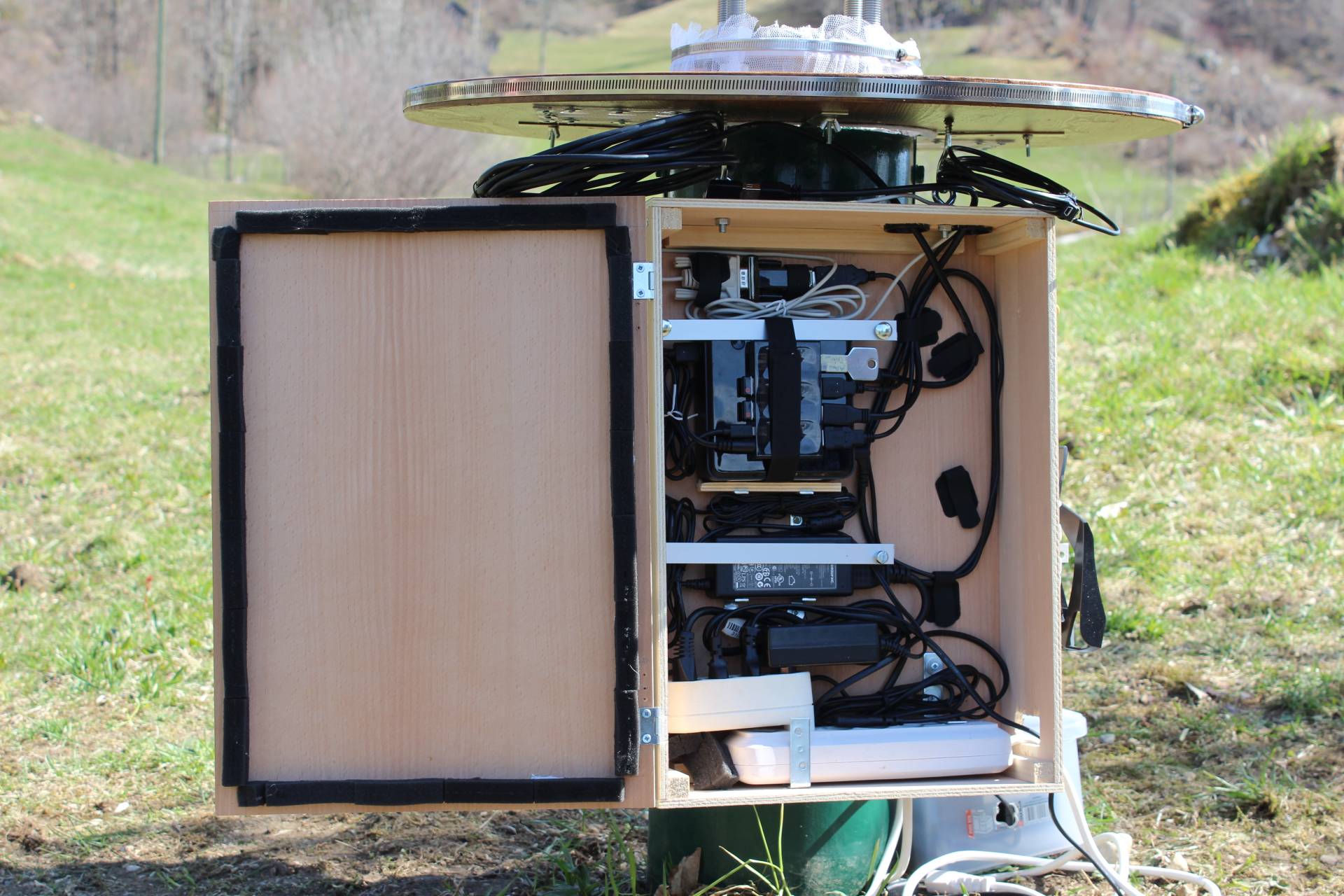
Beschreibung
Ich verfeinerte mein Konzept der „Holzbox“ mit der neuen Situation (Betonsäule ab 10/2018) und ersetze auch den Lenovo AiO PC mit einem Intel NUC. Dieser liefert mehr Leistung und ich konnte in Kombi mit der LAN Anbindung die Latenzprobleme bei der Remote Verbindung beheben.

Vorteile
- Nicht fix an Optik/Montierung
- Einsetzbar an versch. Optiken
- Schutz vor Nässe
- Weniger Kabelsalat
- Bessere Ablage für Guider & Controller
- Steuerung per Remote mit Tablet oder Laptop
- Platzierung des Remote-Clients wählbar

Materialien
- Sperrholz
- Schraubhaken
- Kabeldurchführungen
- Winkel, Schrauben & Muttern
- Stromleiste
- Intel NUC DC53427HYE
- Belkin USB Hub






Strom und LAN Verkabelung

Beschreibung
Die Remote Latenzprobleme und das ewige Aus- und Einrollen der 30m Kabelrolle mussten eliminiert werden. Mit Schaufel und Spaten hob ich einen schmalen Graben aus und verlegte die Kabel in zwei Flexrohren. Jeweils beim Anfang und am Ende sind Steckerboxen in der Erde versenkt, um den Strom einzuspeisen resp. die Montierung damit zu versorgen.

Vorteile
- Physische Verbindung
- Keine Kabel aus/einrollen
Nachteile
- Störungsbehebung
- Austausch aufwendig

Materialien
- Flexrohr Ø 25mm
- Stromkabel
- RJ45 Kupplungen
- LAN Kabel
- DRiBOX 200 (Steckerbox)
Schaltzentrale v1

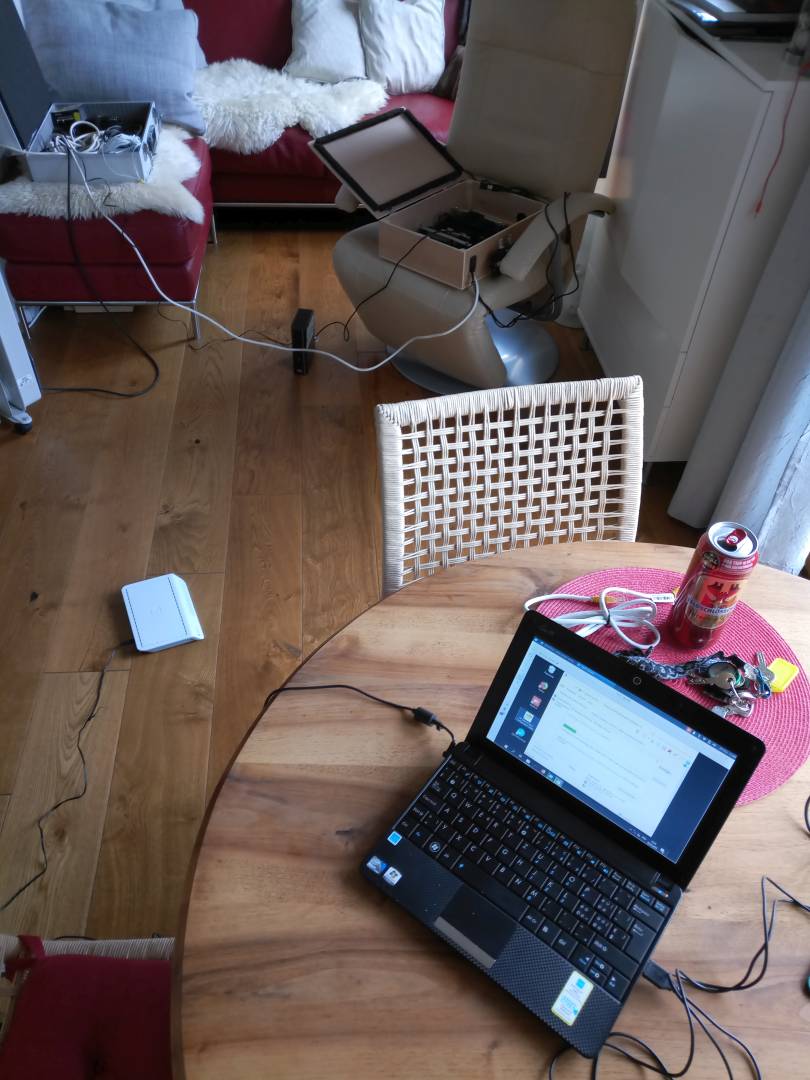
Beschreibung
Durch den ewigen Kabelsalat und den Wunsch nach einer erweiterten Ablage für Handcontroller und MGEN, liess ich mich auf ein spontanes Bastelprojekt ein. Ich baute mir aus Sperrholz eine kleine Box, die einen AiO PC beinhaltet und mit Rohrschellen direkt an das Stativ der CGEM befestigt ist.

Vorteile
- Einsetzbar an versch. Optiken
- Schutz vor Nässe
- Weniger Kabelsalat
- Bessere Ablage für Guider & Controller
- Steuerung per Remote mit Tablet oder Laptop
- Platzierung des Remote-Clients wählbar

Materialien
- Sperrholz
- Schilder-Rohrschellen
- Plastik L Profile
- Winkel, Schrauben & Muttern
- Stromleiste
- Lenovo Q190 AiO PC
- Belkin USB Hub
- TP-Link WLAN Adapter








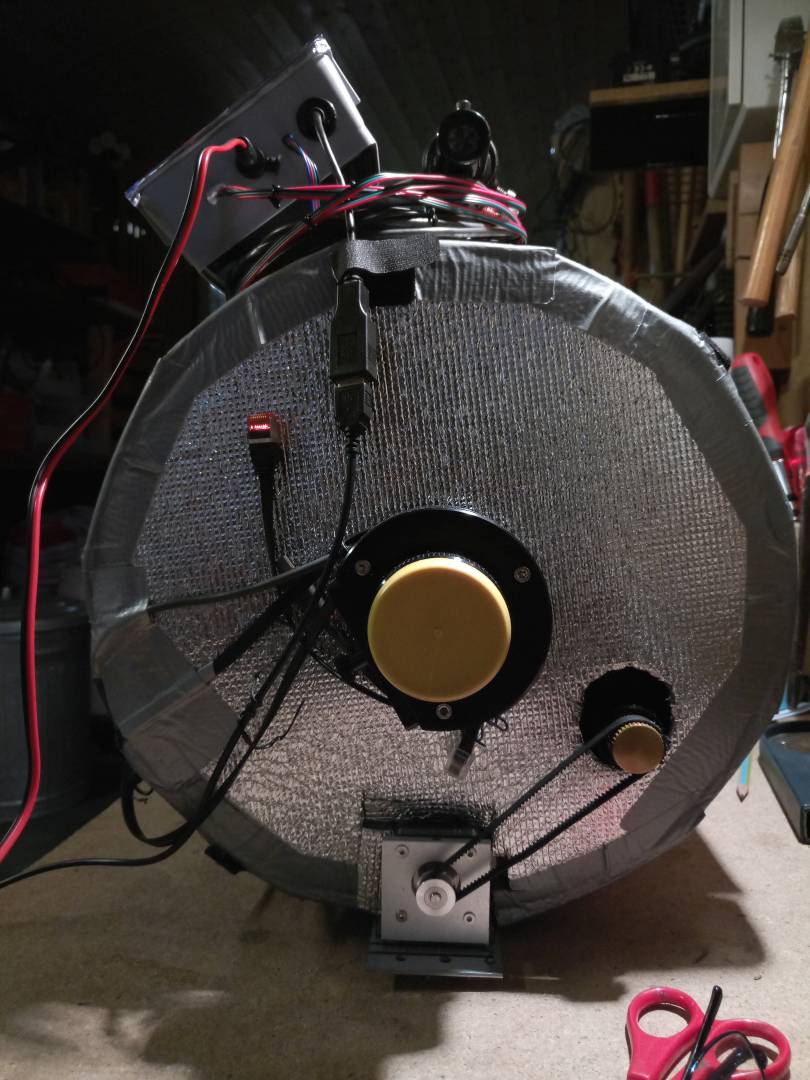
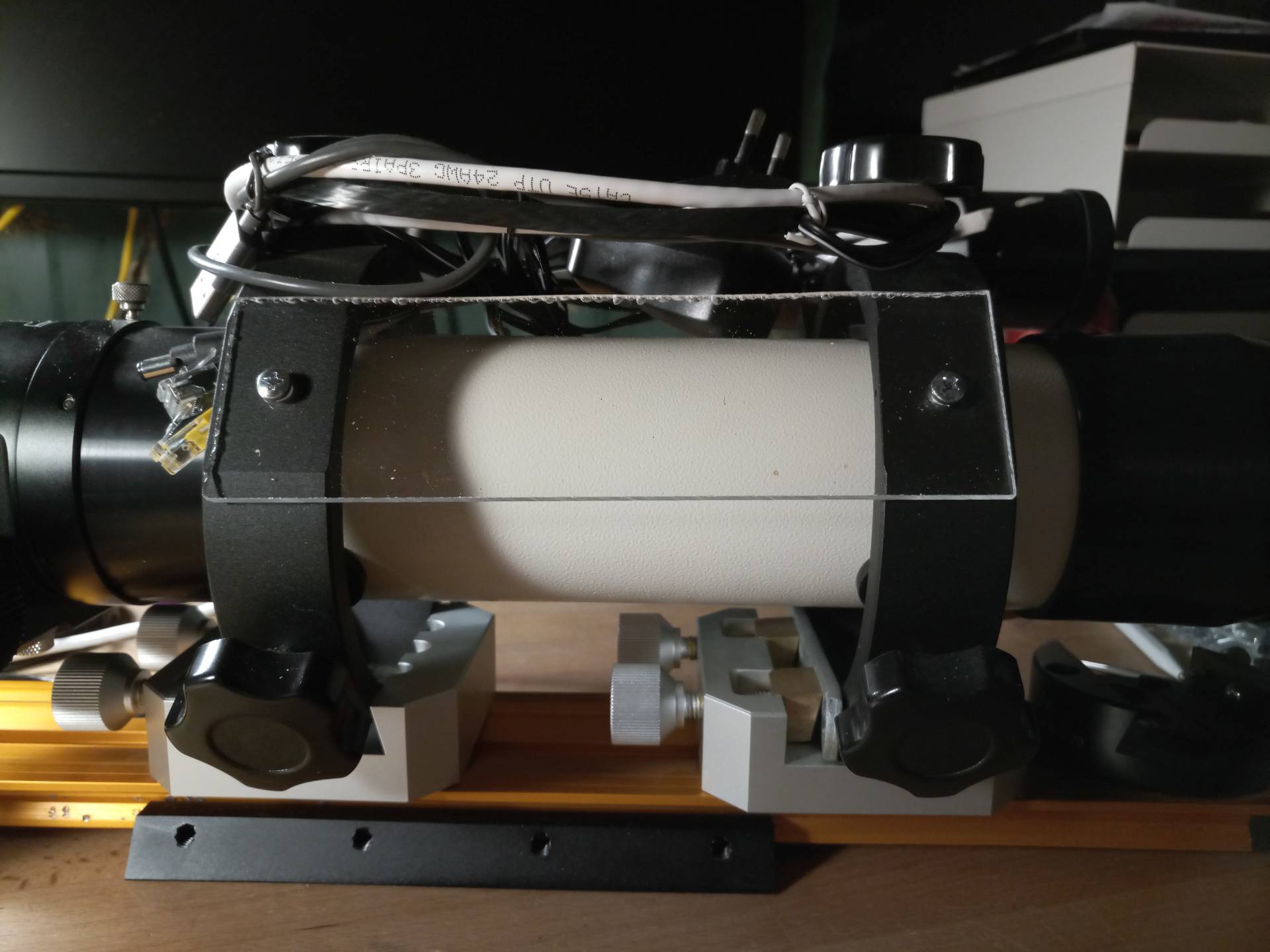
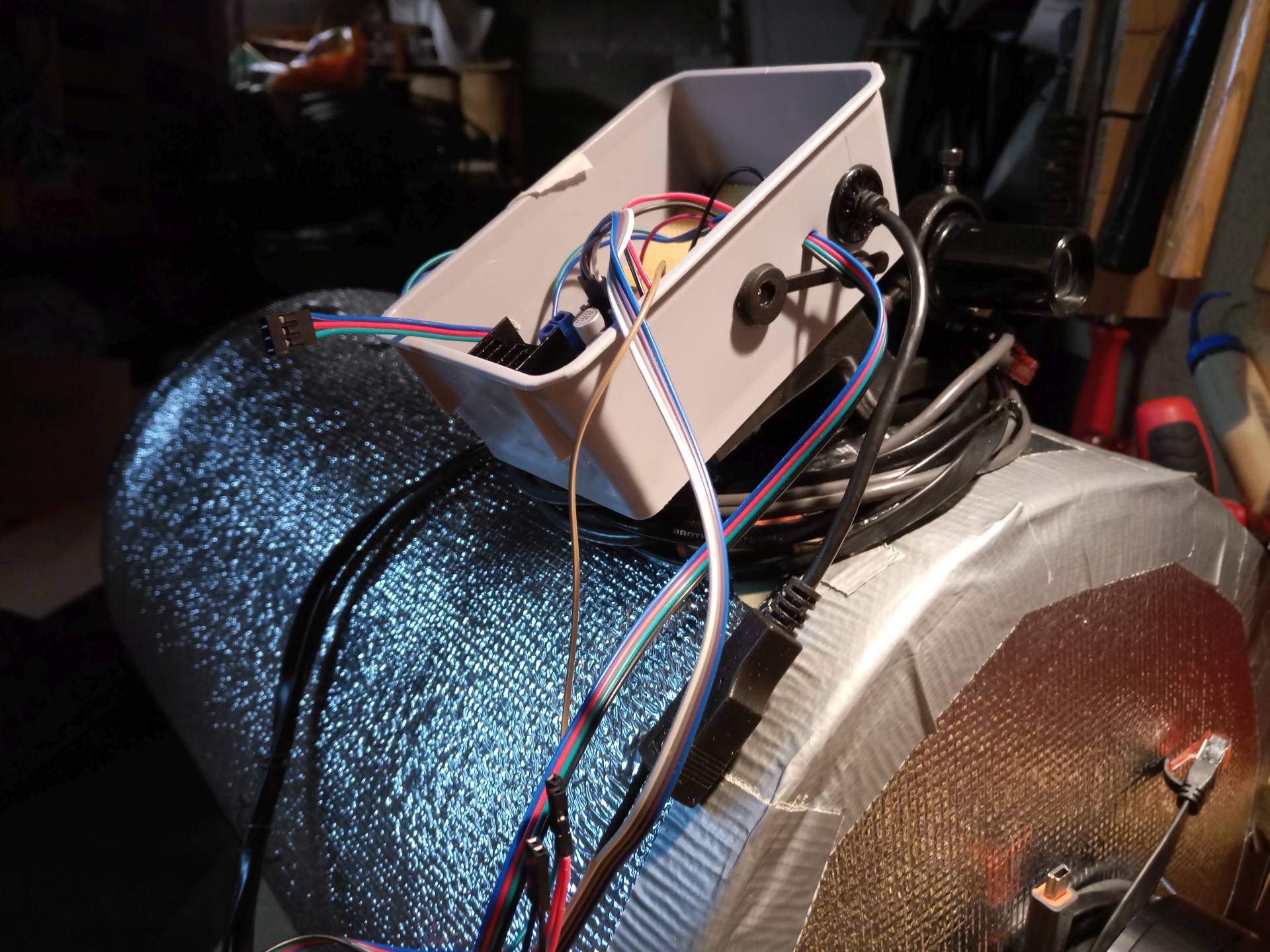
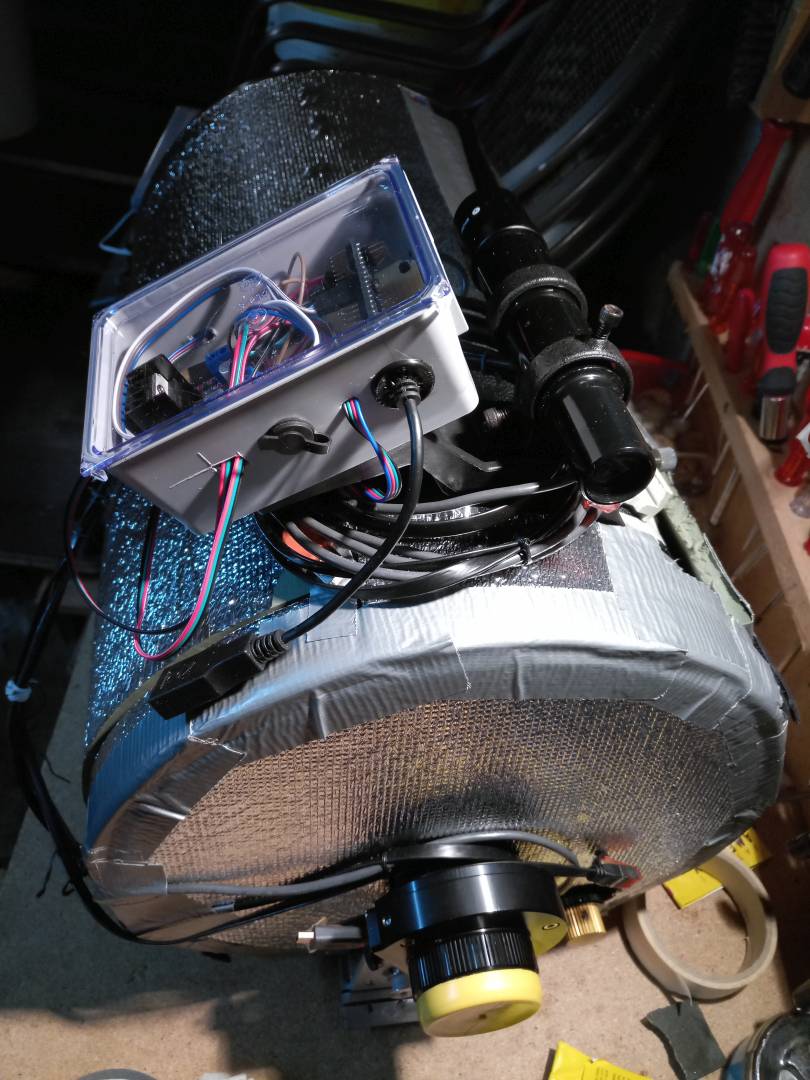
Tubusdämmung
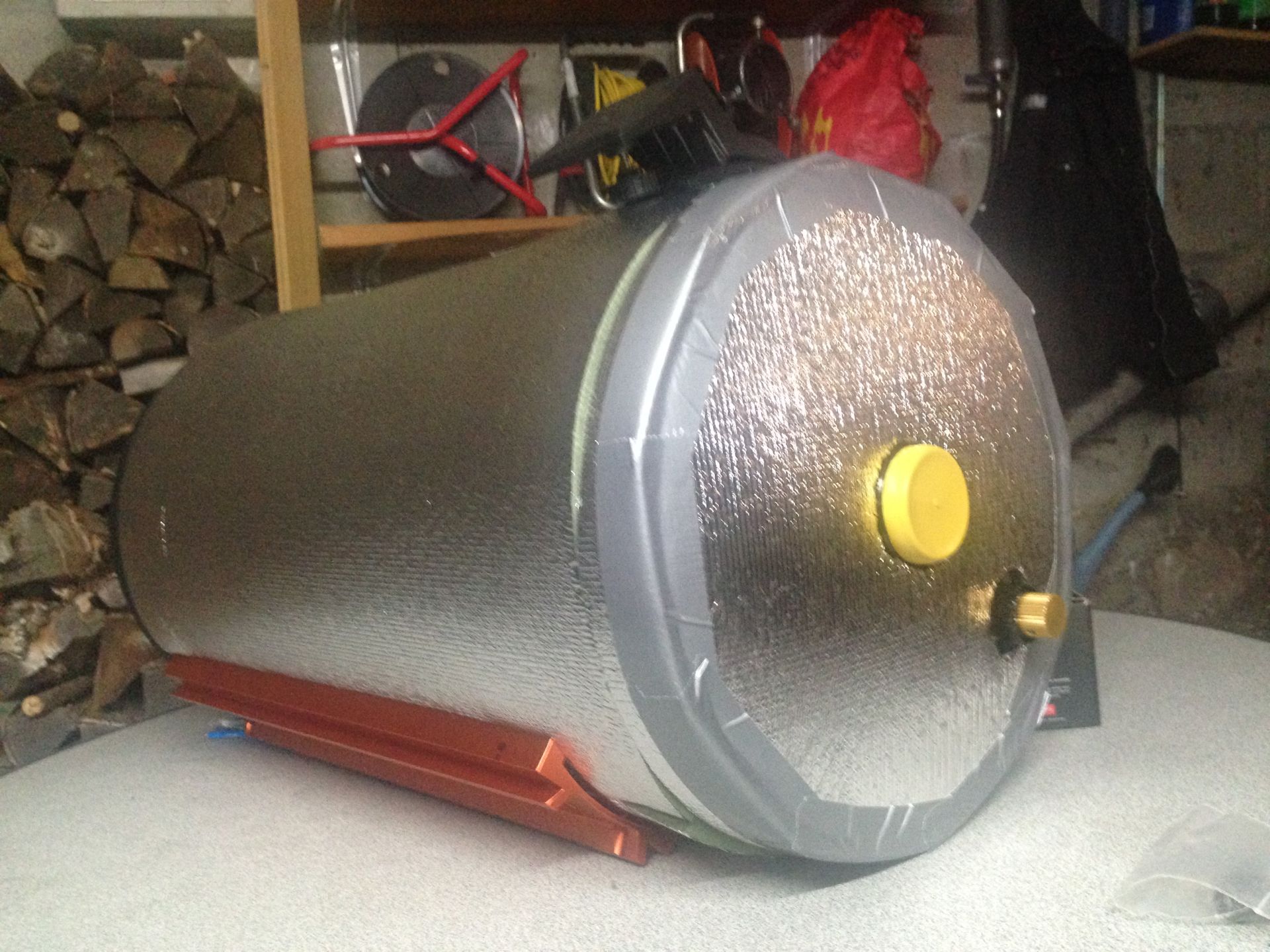
Beschreibung
Inspiriert durch diverse Anleitungen im Netz für die Qualitätsverbesserung der SC Teleskope, spendierte ich dem Tubus eine Ummantelung mit einer Isomatte. Dadurch wird die Temperaturdifferenz der Unter- und Oberseite ausgeglichen.
Vorteile
- Weniger Luftunruhe
- Bessere Abbildung
Nachteile
- Mehr Gewicht
- Längere Auskühlzeit (sofern kein Öffnen der Isomatte möglich ist)

Materialien
- Isomatte 200x50cm
- Klettband
- Karton
- Klebeband
Minigadgets

Masken
Bahtinov Maske als Fokussierhilfe und die Duncan Maske als Kollimationshilfe erleichtern einem das Astroleben! Bei der Bahtinov Maske bin ich aber inzwischen auf eine gekaufte Version umgestiegen.

Rotlichtfolie
Das Licht des Laptops kann die Dunkeladaption stören, aber mit der LEE Farbfolie 106 bleiben die mondlosen Nächte garantiert tiefschwarz. Für einen schnellen Wechsel bastelte ich mir einen Rahmen, der am Laptop eingehängt wird.

Sonnenfilter
Die Sonnenfinsternis 2015 veranlasste mich unter Anderem zum Bau der Sonnenfilter für den Sucher und das 300mm Teleobjektiv der Canon. Auch hier kam Karton, Klebstoff und Klebeband zum Einsatz.

Fundament
Für das 2. Setting (nebst der CGEM auf der Betonsäule) versenkte ich drei Kalksandsteine im Boden. Damit stelle ich die Montierung jeweils ohne Wasserwaage auf, die Stabilität ist besser und ich gewinne noch Zeit beim Installieren.

Flatfieldscheibe
Anstelle einer Flatfield Folie bestellte ich mir ein 4mm A3 Acrylglas (Milchglas 79%). Da ich aber mit der Fotografie noch in den Anfängen stecke, ist die Umsetzung erst mit einer provisorischen Halterung versehen.

Windschutz
Auf 800m über Meter bläst dann und wann ein kräftiger Wind. Um diesem Umstand entgegen zu wirken, entstand aus einer Plane, drei PE Sanitärrohren und Holzstangen ein Windschutz, der seinen Zweck erfüllt – weniger Erschütterungen und Kälte.
<< zurück zu diy projekte >>